Back to Journals » International Journal of Nanomedicine » Volume 21
MRI-Guided Magnetic Micro/Nanorobots for Precision Neurotherapeutics: From Intelligent Navigation and BBB Penetration to Clinical Translation
Authors Xu S ![]() , Fan H, Chen C
, Fan H, Chen C ![]() , Li N, Tang B, Han X
, Li N, Tang B, Han X
Received 16 March 2026
Accepted for publication 3 June 2026
Published 29 June 2026 Volume 2026:21 609510
DOI https://doi.org/10.2147/IJN.S609510
Checked for plagiarism Yes
Review by Single anonymous peer review
Peer reviewer comments 2
Editor who approved publication: Dr Yan Shen
Shufeng Xu,1,* Hongjie Fan,2,* Chao Chen,2,* Ning Li,1,3 Bufu Tang,4 Xiaowei Han1
1Department of Radiology, Wenzhou Medical University Affiliated Quzhou Hospital (Quzhou People’s Hospital), Quzhou, 324000, People’s Republic of China; 2Department of Radiology, Union Hospital, Tongji Medical College, Huazhong University of Science and Technology, Wuhan, Hubei, 430022, People’s Republic of China; 3Jinhua Graduate Joint Training Base, Zhejiang Chinese Medical University, Jinhua, 322100, People’s Republic of China; 4Department of Radiation Oncology, Zhongshan Hospital, Fudan University, Shanghai, 200032, People’s Republic of China
*These authors contributed equally to this work
Correspondence: Xiaowei Han, Department of Radiology, Wenzhou Medical University Affiliated Quzhou Hospital (Quzhou People’s Hospital), Quzhou, 324000, People’s Republic of China, Email [email protected]
Abstract: The rapid advancements in nanotechnology and medical imaging have positioned magnetic resonance imaging (MRI)-guided magnetic micro/nanorobots (MNRs) as a promising platform for integrated diagnosis and treatment of neurological diseases. This review highlights recent progress in MNR development, focusing on fabrication techniques, driving mechanisms, multimodal imaging integration, AI-enabled navigation, blood-brain barrier (BBB) penetration, and disease-specific applications. We analyze biomimetic designs and functional materials for MNRs, including pH- and ROS-responsive degradable materials, liquid metals, and multifunctional coatings.We further examine MRI-based navigation, emphasizing gradient and rotational field control, closed-loop kinematics, and MRI system compatibility. The review also explores AI-assisted multimodal imaging, including MRI, PET, photoacoustic, and fluorescence techniques, alongside the role of deep learning and digital twin models in real-time tracking and path optimization. In addressing the critical challenge of BBB penetration, we review both conventional and emerging strategies. Finally, we assess preclinical findings on the application of MNRs in brain tumors, cerebrovascular diseases, and neurodegenerative disorders. We further highlight how MNR systems improve therapeutic outcomes by enhancing local drug concentrations, enabling spatiotemporally controlled release, and providing real-time imaging feedback, thereby addressing key failure modes of conventional systemic therapies. The review concludes with a critical assessment of translational challenges and a roadmap toward intelligent, personalized neurotherapeutics.
Keywords: magnetic micro/nanorobots, MRI, neurological disorders, blood–brain barrier, artificial intelligence, theranostics, interdisciplinary integration, precision medicine
Introduction
Neurological disorders present major global health challenges. Epidemiological data indicate that approximately 12 million new cases of stroke occur annually worldwide,1 while neurodegenerative diseases such as Alzheimer’s disease (AD) and Parkinson’s disease (PD) affect more than 60 million individuals.2 With the continued aging of the global population, their incidence is expected to rise sharply. Although malignant brain tumors are relatively rare, they remain among the most difficult cancers to treat, characterized by high recurrence rates and unsatisfactory five-year survival outcomes. From a therapeutic perspective, the blood–brain barrier (BBB) — while serving as a critical protective interface against harmful substances — severely limits the efficient delivery of therapeutic agents to the central nervous system (CNS). Traditional treatment modalities often suffer from poor target specificity, systemic drug administration reduces the local concentration at the lesion site, and off-target toxicity leads to considerable adverse effects. Advanced alternatives such as passive nanoparticles, ligand-targeted delivery systems, and focused ultrasound (FUS)-mediated BBB disruption have partially addressed these barriers, yet each faces persistent shortcomings. Passive nanoparticles rely on the enhanced permeability and retention (EPR) effect, which is heterogeneous and often insufficient in brain tumors; ligand-targeted systems improve specificity but are still subject to rapid systemic clearance and off-target binding; FUS-mediated BBB opening is temporary and requires repeated interventions with potential for tissue damage. MRI-guided MNRs, in contrast, uniquely integrate active propulsion, real-time navigation, and triggered payload release, offering the potential to overcome these limitations synergistically.
In recent years, the rapid progress of nanotechnology and biomedical engineering has spurred the emergence of magnetic resonance imaging (MRI)-guided magnetic micro/nanorobots (MNRs) as a transformative theranostic platform with remarkable potential in neuromedicine.3 MNRs are micro- to nanoscale robots typically composed of magnetic or magnetically responsive materials that can be precisely manipulated under external magnetic fields. These miniature robots possess several unique advantages: (i) their diminutive size enables penetration into microenvironments inaccessible to conventional medical tools; (ii) magnetic actuation allows for highly controllable motion and spatial localization; (iii) they can carry therapeutic or diagnostic payloads, achieving integrated “diagnosis and therapy” (theranostics); and (iv) their material composition and surface properties can be tailored to suit diverse physiological conditions and treatment requirements.
Particularly noteworthy is the evolving role of MRI within the MNR system, which extends far beyond its conventional use as a diagnostic imaging modality. Traditionally, MRI has provided noninvasive, high-resolution anatomical and functional imaging for clinical diagnosis. Today, however, it serves a dual function as both an imaging and navigation platform. By leveraging its gradient and homogeneous magnetic fields, MRI can achieve real-time actuation, closed-loop control, and precise navigation of MNRs within complex neural and vascular microenvironments.4–6 This transformation signifies a paradigm shift in MRI—from a passive imaging modality to an active, intelligent component of interventional therapy.
The development of MRI-guided MNRs inherently depends on the convergence of multiple disciplines, including materials science, imaging technology, artificial intelligence (AI), robotics, and immunology.7–10 Such interdisciplinary integration not only drives innovation in bioinspired design, propulsion mechanisms, and biocompatible materials but also offers new solutions to long-standing challenges in neurological diagnostics and therapeutics.
This review aims to provide a comprehensive overview of the latest advances in MRI-guided MNRs for the diagnosis and treatment of neurological disorders. We summarize their design and fabrication principles, MRI-based actuation and navigation strategies, multimodal imaging integration, intelligent navigation systems, and BBB-penetration mechanisms, followed by their emerging applications in brain tumors, cerebrovascular diseases, and neurodegenerative disorders. Finally, we critically discuss current challenges regarding biosafety, standardization, and interdisciplinary collaboration, and highlight future perspectives for the intelligent, personalized, and clinically translatable development of MRI–MNR systems.
Fabrication and Functional Design of MNRs
Conventional Fabrication Methods
The fabrication of MNRs forms the technological foundation for their biomedical applications and can generally be categorized into two main strategies: the top-down and bottom-up approaches.3
The top-down approach relies on advanced micro- and nanofabrication techniques that sculpt predesigned micro/nanostructures from bulk materials through subtractive processing. Representative techniques include injection molding, self-rolling fabrication, and melt electrospinning. Injection molding involves injecting magnetic composite materials into predefined molds, followed by curing and demolding to produce MNRs of specific geometries, such as capsule- or helical-shaped microrobots. Using this approach, Nelson et al successfully fabricated magnetic microhelices capable of efficient propulsion under rotating magnetic fields, mimicking the motion of bacterial flagella.11 In the self-rolling technique, stress gradients are engineered within thin-film materials (eg., polymeric or metallic bilayers). Upon thermal treatment or chemical stimulation, these layers spontaneously roll into tubular or helical configurations. The integration of magnetic coatings further enables magnetic actuation and navigation. Melt electrospinning involves extruding molten magnetic polymers under a high-voltage electric field, forming continuous magnetic microfibers or nanofibers that can later be structured into flexible and porous MNR architectures. Top-down methods offer mature and scalable manufacturing processes with high reproducibility, but their precision is typically limited when targeting nanoscale dimensions.
In contrast, the bottom-up approach constructs MNRs by assembling molecular or nanoscale building blocks through physical or chemical processes, emphasizing high structural precision and functional integration. Representative techniques include self-assembly, 3D printing, and chemical synthesis. Self-assembly leverages intermolecular forces such as electrostatic interactions and van der Waals forces to organize magnetic nanoparticles (eg., Fe3O4 nanoparticles) with functional materials (eg., PLGA, SiO2) into ordered micro/nanostructures. This allows for fine control over particle size, dispersion, and functionality. Pumera et al developed tubular and rod-like MNRs based on superparamagnetic iron oxide nanoparticles (SPIONs) using this strategy, demonstrating effective targeted drug delivery performance.12 Bioinspired self-assembly utilizes natural biological components—such as cell membranes or bacterial shells—to endow MNRs with inherent biocompatibility, immune evasion, prolonged circulation, and specific targeting capabilities, substantially enhancing their adaptability in complex biological environments.13 Three-dimensional (3D) printing, using techniques such as photopolymerization or fused deposition modeling, enables the layer-by-layer fabrication of biocompatible polymeric matrices (eg., gelatin, sodium alginate) embedded with magnetic materials. This approach allows the creation of structurally complex MNRs, such as capsules or porous scaffolds, providing a customizable route to achieve precise design and functional diversity. Table 1 summarizes the main features of representative top-down and bottom-up approaches.
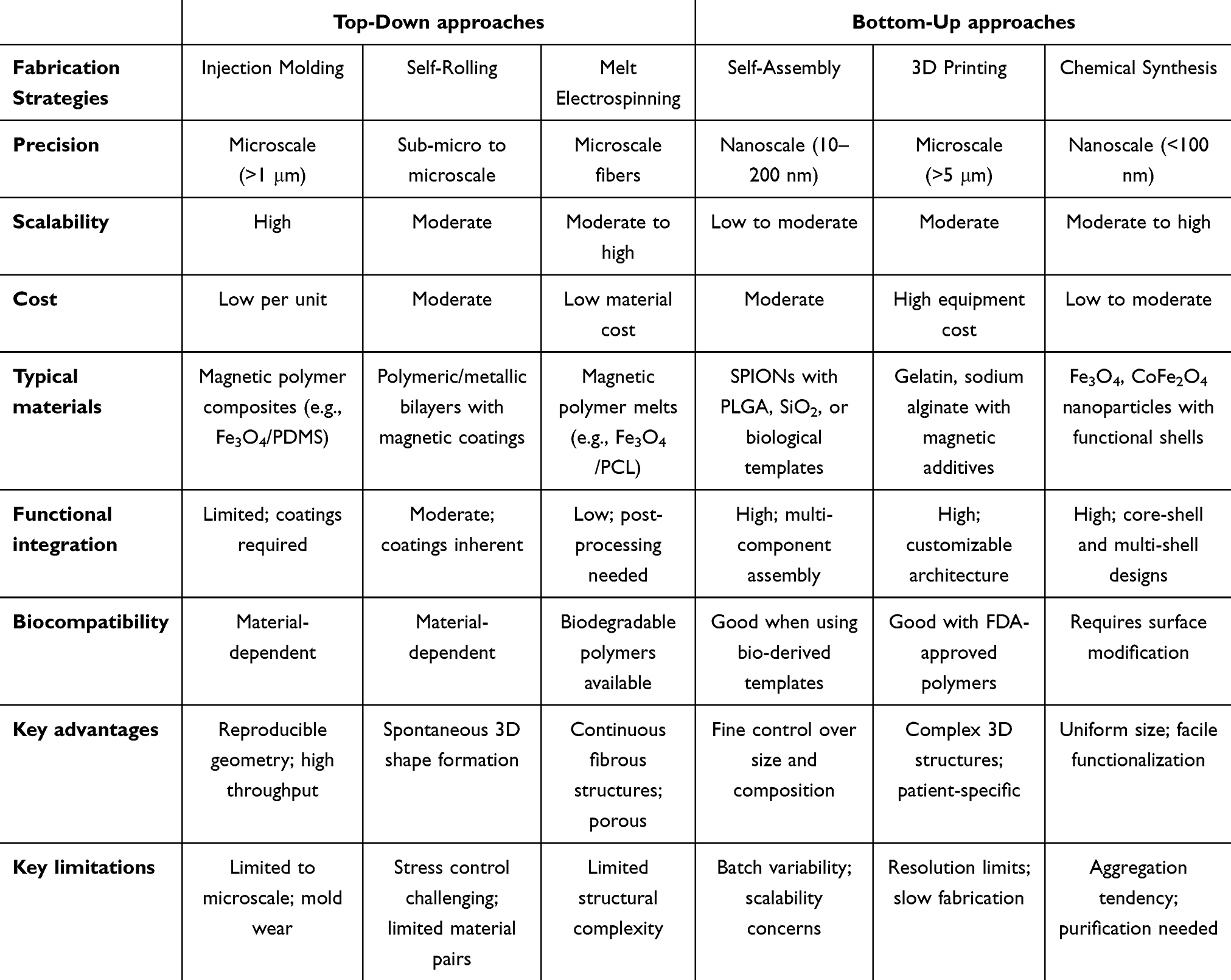 |
Table 1 Comparison of Representative Fabrication Strategies for Magnetic Micro/Nanorobots |
Bioinspired and Programmable Design
The locomotion mechanisms of microorganisms in nature have provided rich inspiration for the design of MNRs. Prokaryotic organisms such as bacteria achieve propulsion through rigid helical flagella, which enable a “run-and-tumble” motion driven by rotary motors that generate propeller-like thrust.14 In contrast, eukaryotic cells such as spermatozoa employ flexible flagella based on the classical “9+2” microtubule arrangement, producing wave-like undulations for propulsion—an adaptation particularly suited to highly viscous biological environments.15 These two biological models respectively exemplify rotational and undulatory propulsion, the fundamental paradigms underlying MNR locomotion.
Inspired by bacterial flagellar motion, Nelson et al11 developed magnetically actuated helical microrobots that convert magnetic torque into helical propulsion under rotating magnetic fields, achieving motion closely resembling that of natural bacteria. Similarly, Celi et al16 fabricated flexible sperm-inspired nanorobots capable of helical propulsion in viscous biological fluids under oscillating magnetic fields, with their swimming mode dynamically tunable by adjusting the magnetic field frequency. To address the low propulsion efficiency characteristic of low-Reynolds-number environments, Li et al17 designed an asymmetric dumbbell-shaped “freely swimming” magnetic nanorobot that generates differential thrust under rotating magnetic fields, significantly improving propulsion efficiency.
Beyond structural biomimicry, hybrid biointegration strategies have further expanded the capabilities of MNRs. Gong et al18 reported a biohybrid microrobot constructed by integrating Chlorella cells with magnetic nanoparticles, enabling remote magnetic control in conjunction with autonomous chemotactic motion derived from the intrinsic metabolic activity of living cells. This represents a biologically inspired approach to replicating natural decision-making and adaptive motility. Through such bioinspired and programmable designs, MNRs can achieve microorganism-like efficiency, adaptability, and intelligence in navigating the complex and dynamic physiological microenvironments of the human body.
Emerging Material Strategies
The development of novel functional materials has greatly expanded the application prospects of MNRs. Among these, pH- and reactive oxygen species (ROS)-responsive degradable materials have become one of the most intensively studied topics. These materials are typically based on biodegradable polymers such as polyethylene glycol (PEG), polycaprolactone (PCL), and poly(lactic-co-glycolic acid) (PLGA), modified with chemical bonds or moieties sensitive to pH or ROS. Such modifications enable controlled drug release or self-degradation of the carrier under specific physiological conditions, such as acidic or oxidative microenvironments. For instance, Wang et al19 developed a nanocarrier integrating dual pH and temperature responsiveness that triggers drug release within the tumor microenvironment, thereby improving pharmacokinetic behavior, solubility, and drug stability. Similarly, stimuli-responsive hydrogel-based MNRs have shown great promise for on-demand drug delivery. Xu et al20 designed magnetically responsive hydrogel microrobots capable of precise drug delivery to brain tumor sites, followed by magnetically induced disintegration. This design not only enables spatiotemporally controlled release but also ensures rapid biodegradation of the robots after task completion, minimizing the risk of long-term retention.
Another emerging trend involves liquid metal and biomimetic camouflage strategies, both of which significantly enhance the adaptability and functionality of MNRs. Liquid metals, particularly gallium-based alloys, have attracted extensive attention due to their unique physicochemical properties, including fluidity at room temperature, high surface tension, excellent electrical conductivity, and biocompatibility. Under magnetic field control, liquid metal microrobots can dynamically alter their shape to traverse complex environments and even squeeze through constrictions smaller than their initial dimensions. Additionally, the spontaneous formation of an oxide shell on their surface facilitates subsequent functional modification. Wu et al21 embedded iron nanoparticles into a gallium–indium alloy matrix to fabricate magnetic liquid metal microrobots (LMMRs) that can undergo controlled morphological transformations under rotating magnetic fields, thereby achieving effective penetration of the BBB. Meanwhile, biomimetic membrane coating strategies have been developed to cloak MNRs with natural cell membranes—such as those derived from neutrophils22, macrophages,23 red blood cells,24 stem cells,25 and tumor cells26—to endow them with immune-evasive properties and intrinsic biological functionalities like inflammation homing, thereby improving targeting toward diseased tissues (Figure 1).27 He et al28 introduced an enzyme-powered nanorobotic system, termed the “Trojanbot”, for glioma therapy. In this system, MNRs are encapsulated within neutrophils, which leverage their natural chemotaxis to cross the BBB and deliver the nanorobots to tumor sites. Once localized, the H2O2-rich tumor microenvironment catalyzes decomposition reactions that generate thrust, enhancing deep-tissue penetration and promoting drug diffusion into the tumor core. In vivo experiments demonstrated that this system achieved a 33.5% increase in targeted drug delivery efficiency and significantly improved therapeutic outcomes.
 |
Figure 1 Yuan S, et al Recent advances of engineering cell membranes for nanomedicine delivery across the blood-brain barrier. J Nanobiotechnology. 2025 Jul 8;23(1):493. doi: 10.1186/s12951-025-03572-y. PMID: 40624508; PMCID: PMC12235962.27 (A) Schematic illustration of the BBB structure. (B) Diagram depicting the passive transcytosis mechanisms of nanomedicines across the BBB. Reproduced from Ref. [Recent advances of engineering cell membranes for nanomedicine delivery across the blood-brain barrier], licensed under Creative Commons Attribution 4.0 Unported License (CC BY 4.0: https://creativecommons.org/licenses/by/4.0/). |
Surface engineering and multifunctional coating strategies have become central to the clinical translation of MNRs. PEGylation remains the standard approach for improving biocompatibility and prolonging systemic circulation.29 More advanced targeting coatings have been designed to integrate diagnostic and therapeutic capabilities. For example, a transferrin-targeted MnS nanoplatform reported by Zhang et al30 can decompose under acidic tumor conditions to release Mn2⁺ ions, thereby enhancing T1-weighted MRI contrast with a relaxivity superior to that of clinical Gd-DTPA. Similarly, Forgham et al31 engineered fluoropolymer-coated magnetic nanoparticles with surface cationic groups and fluorinated tails, achieving efficient BBB penetration and simultaneous gene-silencing functionality (Figure 2). Moreover, metal–polyphenol complex (MPC) coatings32 have been developed to provide additional immunomodulatory functions, mimicking in vivo biochemical environments and further enhancing therapeutic synergy. Extending the biohybrid concept to living immune cells, Dogan et al demonstrated macrophage-based microrobots that combine wireless magnetic actuation, real-time MRI and optoacoustic tracking, and macrophage-mediated antitumor activity within a single integrated system, providing proof-of-concept for clinically translatable immune cell-based microrobotic platforms.33
 |
Figure 2 Forgham H et al Multifunctional Fluoropolymer-Engineered Magnetic Nanoparticles to Facilitate Blood-Brain Barrier Penetration and Effective Gene Silencing in Medulloblastoma. Adv Sci (Weinh), 2024, 11(25): e2401340.32 Reproduced from Ref. [Multifunctional Fluoropolymer-Engineered Magnetic Nanoparticles to Facilitate Blood-Brain Barrier Penetration and Effective Gene Silencing in Medulloblastoma], licensed under Creative Commons Attribution 3.0 Unported License (CC BY 3.0: https://creativecommons.org/licenses/by/3.0/). |
MRI-Driven Actuation and Navigation Strategies
Gradient and Rotating Field Control Mechanisms
Magnetic actuation lies at the core of motion control for MNRs, enabling precise manipulation through external magnetic fields in a non-contact, biocompatible, and highly accurate manner. The underlying principle relies on the interaction between magnetic materials and applied magnetic fields. MRI systems are typically equipped with three gradient coils capable of generating spatially varying gradient fields (∇B), which act on the magnetic components within MNRs (eg., SPIONs) to induce magnetic moments and generate torque (τ) and force (F).5 These interactions facilitate precise regulation of locomotion direction and mode. The mechanism is conceptually analogous to “magnetic tweezers”,34 allowing for targeted guidance of robotic swarms toward specific regions. In recent years, magnetic-field-driven MNRs have achieved remarkable progress and innovation across multiple biomedical domains.
To enhance magnetic control precision, researchers have optimized both field-generation systems and MNR architectures, achieving manipulation accuracies at submillimeter or even nanometer scales. Abdelaziz et al developed a three-dimensional electromagnetic actuation system composed of three pairs of Helmholtz coils and three pairs of Maxwell coils integrated with a closed-loop feedback algorithm, significantly improving trajectory-tracking performance.35 Although such 3D electromagnetic systems offer superior precision, they remain complex and bulky. In contrast, C-type magnetic drive systems provide greater operational flexibility and are more suitable for in vivo applications within dynamic blood flow environments, whereas 3D coil setups are more often used in in vitro or animal model studies. Notably, C-type systems effectively mitigate interference from hemodynamic disturbances. For example, Wang et al successfully guided drug-loaded MNRs across disrupted blood flow regions in animal models using a C-type setup, offering a precisely controllable kinetic approach for thrombolytic therapy.7 Moreover, recent studies have demonstrated synchronized collective motion and dynamic formation control of high-density MNR swarms, offering a scalable strategy for large-volume, coordinated drug delivery.36
Another critical actuation mechanism involves rotating magnetic fields, particularly for anisotropic MNRs such as helical or flagella-inspired designs. These MNRs can convert rotational magnetic torque into efficient propulsion, mimicking the corkscrew motion of bacterial flagella and improving motility in viscous biofluids. Symmetry analysis reveals that an in-plane or conical rotating field can generate a net thrust along the field rotation axis.37 By adjusting the Helmholtz coil configuration to alter the axis orientation, collective trajectories of multiple MNRs can be steered directionally. When combined with a static magnetic bias field, complex 3D trajectory control can be achieved; for instance, asymmetric in-plane fields can induce lateral drift within the xy-plane, enabling programmable swarm navigation deviating from the z-axis.38 MRI-based systems further enhance these mechanisms through real-time high-resolution imaging feedback, allowing for dynamic adjustment of gradient and rotating field parameters to achieve closed-loop navigation and trajectory planning in complex physiological environments.6 Jin et al demonstrated a multifunctional nanorobotic system (Figure 3) in which the electromagnetic drive module generated gradient fields to precisely guide motion and regulate drug release. This system exhibited excellent remote controllability and deep-tissue penetration, highlighting the potential of magnetically responsive actuation for precision diagnosis and therapy of deep-seated neurological disorders.39 Taken together, the gradient‑based and rotating‑field strategies discussed above present complementary strengths that translate into distinct application niches. Gradient‑pulling approaches offer superior spatial precision and are inherently compatible with clinical MRI gradient hardware, but the achievable forces impose practical limits on speed and penetration depth in viscous or rapidly flowing biofluids. Rotating‑field propulsion, particularly when coupled with helical or chiral microrobot geometries, achieves markedly higher velocities and more efficient locomotion in low‑Reynolds‑number environments, yet this gain comes at the cost of increased sensitivity to flow disturbances and field‑axis misalignment. In small‑animal studies, C‑shaped gradient systems have successfully directed MNRs through regions of interrupted blood flow,7 whereas rotating‑field strategies have demonstrated robust collective navigation of magnetic swarms in murine vasculature.36 The choice between these two modes—or the adoption of hybrid schemes that integrate both—should therefore be governed by the intended task profile: speed requirements, local viscosity, vascular tortuosity, and the necessity for either precise static localization or rapid transit over longer distances.
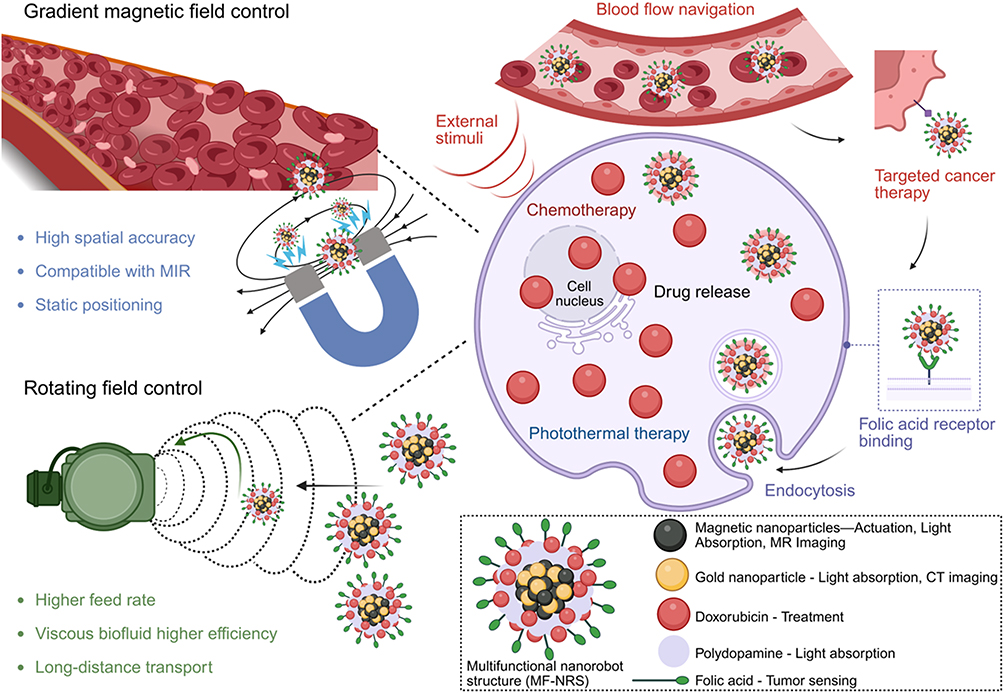 |
Figure 3 Magnetically driven nanorobotic system: gradient fields enable precise motion, drug release, deep-tissue penetration, and remote control for treating deep-seated neurological disorders.39 |
Closed-Loop Kinematics of Individual and Collective MNRs
MRI systems enable closed-loop motion control of MNRs through real-time imaging feedback, allowing precise localization and dynamic adjustment of magnetic field parameters during navigation.6 For single MNRs, localization is typically achieved by detecting the negative contrast generated by embedded magnetic components (eg., SPIONs) on T2-weighted MRI. However, the limited signal-to-noise ratio and spatial resolution still pose challenges for accurate single-particle tracking in vivo.
In contrast, collective MNR assemblies leverage magnetic dipole–dipole interactions and hydrodynamic coupling to form chain-like or clustered configurations,36 which not only enhance MRI contrast but also improve propulsion efficiency and drug delivery performance. For example, the Sitti group programmed ferromagnetic micro-robots into predesigned patterns using external magnetic field arrays (Figure 4),40 achieving improved collective controllability and enhanced imaging visibility. Under rotating magnetic fields, magnetic Janus particles can self-assemble into stable hexagonal patterns,41 whereas Fe3O4 nanoparticles can form flexible ribbon-like micro-swarms with remarkable stretchability when actuated by oscillating fields.42
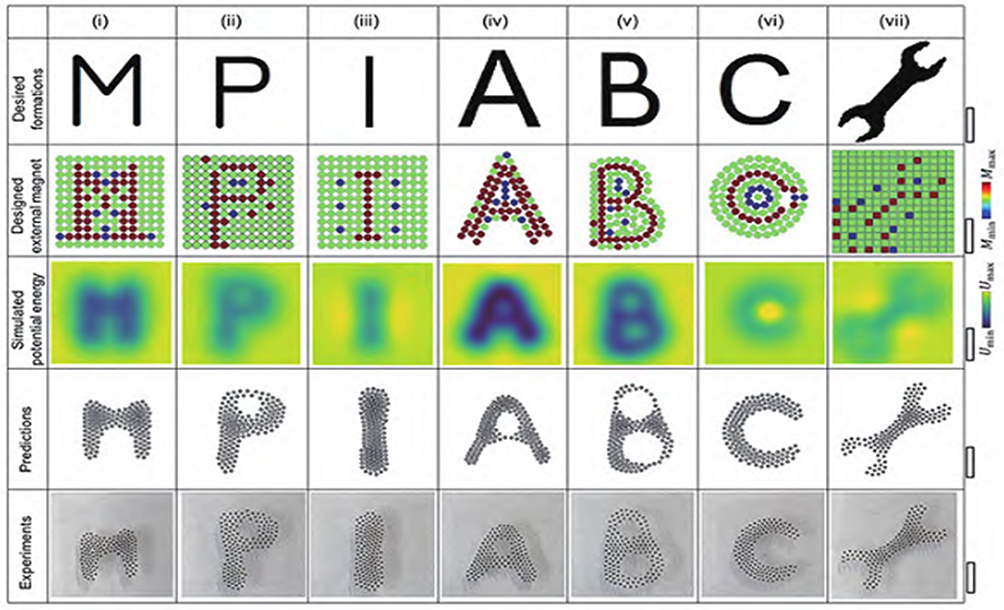 |
Figure 4 Dong, X and M. Sitti. Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms. 2020. 39(5%J Int. J. Rob. Res): p. 617–638.40 (i) - (vii) represents the static formations of different formation patterns under different collective magnetic microrobots programming. The figure was reproduced with the permission of ref. [Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms], copyright@ Sage Publications Ltd. Press, 2014). |
To achieve autonomous navigation, closed-loop control algorithms have been developed based on vascular anatomy and hemodynamic transport models,43 optimizing swarm trajectories and target delivery efficiency within complex vascular networks. Moreover, hydrodynamic interactions among MNRs play a crucial role in coordinating swarm behavior. Rotating paramagnetic nanoparticle chains generate localized vortices that induce long-range attractive forces on neighboring chains, leading to the spontaneous formation of ring-shaped vortex swarms under rotating magnetic fields.44 Such collective dynamics not only amplify MRI signal contrast but also enhance therapeutic efficacy through synergistic physical effects, including localized hyperthermia and magnetically triggered drug release.Importantly, MRI-guided feedback systems are capable of continuously monitoring swarm morphology—such as expansion, contraction, or fragmentation—and dynamically adjusting magnetic field parameters for adaptive motion planning. This enables precise navigation, obstacle avoidance, and task-specific behavior in complex physiological microenvironments, advancing the realization of intelligent, MRI-integrated robotic systems for targeted diagnosis and therapy. To enable a quantitative comparison of the diverse MNR platforms discussed before, Table 2 summarizes key performance metrics from representative systems.
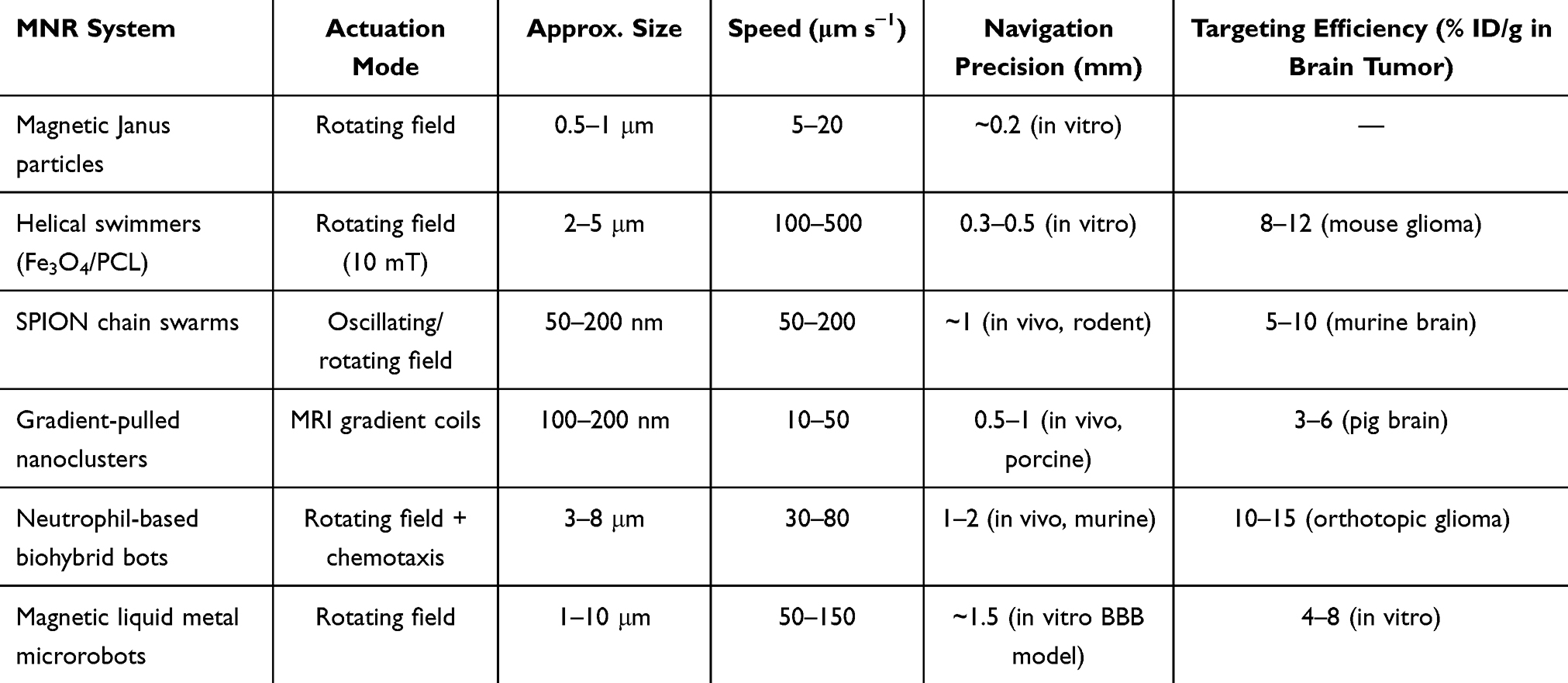 |
Table 2 Quantitative Performance Metrics of Representative MNR Systems |
MRI Compatibility and System Modification Requirements
Existing clinical MRI systems were not originally designed for MNR actuation, and thus face several compatibility challenges in practical applications. The first limitation pertains to the gradient system. Although diagnostic MRI systems are capable of generating sufficiently strong magnetic field gradients, their primary design focus is on imaging rather than actuation. As a result, these systems fall short in terms of control precision, response speed, and long-term stability. To address these deficiencies, additional gradient coils or radiofrequency (RF) modules are often required to enhance magnetic field control accuracy45 For example, three-dimensional electromagnetic drive systems enable submillimeter-scale manipulation, while C-type magnetic drive systems are better suited for in vivo applications within dynamic blood flow environments.7 External permanent magnets6,46 or magnetic tweezer technologies34 can also generate high gradient fields, but the latter is considered invasive, which limits its clinical applicability. Beyond these hardware‑oriented constraints, clinical MRI systems also impose fundamental physical limitations on MNR navigation that arise from the competing demands of imaging and actuation. Standard anatomical MRI sequences can achieve sub‑millimeter spatial resolution—sufficient for visualizing large vessels and target lesions—but their acquisition times typically range from seconds to minutes, making them fundamentally incompatible with real‑time tracking of microrobots moving at tens to hundreds of micrometers per second. Even accelerated sequences such as echo‑planar imaging (EPI), which reduce temporal resolution to approximately 50–100 ms, do so at the expense of spatial fidelity and are prone to geometric distortions and signal dropout near air–tissue interfaces. Furthermore, gradient amplitudes in clinical scanners are generally capped at ≈40 mT m−1, which limits the maximum force exerted on MNRs; sustained gradient switching at these limits raises concerns about peripheral nerve stimulation (PNS) and tissue heating, setting a ceiling on both actuation strength and duty cycle. Ultra‑high‑field systems (7 T and above) improve signal‑to‑noise ratio and spatial resolution, yet the accompanying increase in magnetic susceptibility effects generates pronounced artifacts around the paramagnetic or superparamagnetic cores of MNRs, thereby complicating precise localization.
Another challenge arises from the imaging sequence compatibility. Traditional MRI sequences are primarily designed for anatomical or functional imaging and are not optimized for the tracking and navigation of MNRs. To overcome this, it is essential to integrate high-speed imaging sequences, such as Echo Planar Imaging (EPI),47 and respiratory gating techniques to capture rapid MNR movement while minimizing motion artifacts. In some cases, multimodal fusion (eg., photoacoustic-MRI48) can complement the limitations of single-modality imaging, significantly improving real-time monitoring capabilities.
Thermal effects and safety are also critical considerations. Prolonged MNR actuation requires the continuous application of magnetic fields, which can potentially lead to tissue heating or neural stimulation. Thus, comprehensive safety monitoring systems and control strategies are essential to ensure the safety of the treatment process. This is especially important when employing ultra-high magnetic field strengths or high-frequency fields, where the potential thermal and biological effects must be rigorously evaluated to prevent adverse outcomes.
Future Prospects
The future development of MRI-driven actuation and navigation strategies will depend heavily on the widespread adoption of ultra-high-field MRI systems (such as 7T and beyond). These systems can significantly enhance spatial resolution and signal-to-noise ratio, enabling more precise tracking and manipulation of individual MNRs.49 Moreover, quantum technologies present new opportunities for advancing MRI-based actuation and navigation. Quantum sensors, such as diamond sensors based on nitrogen-vacancy (NV) centers, can detect extremely weak magnetic signals with sensitivities several orders of magnitude higher than conventional MRI. This ultra-high sensitivity enables the tracking of MNRs at the single-particle level, opening new avenues for precision medicine.
In addition, quantum imaging technologies have the potential to greatly improve MRI performance. Quantum-enhanced imaging can overcome traditional signal-to-noise limitations, allowing for high-quality images to be obtained with lower magnetic field strengths or shorter scanning times. This not only reduces scan duration and lowers equipment costs but also decreases radiofrequency energy deposition, enhancing safety. Furthermore, the miniaturization of quantum sensors enables their integration into catheters or endoscopes, facilitating close-range imaging and manipulation, thereby improving navigation accuracy. The integration of AI and machine learning (ML) algorithms9,10 will further optimize magnetic field control strategies and path planning, enabling autonomous navigation and intelligent response of MNRs in complex environments.
Multimodal Imaging and AI-Enabled Intelligent Navigation
Multimodal Imaging Fusion
Multimodal imaging fusion is a critical technology for enhancing the navigation precision and therapeutic efficacy of MNRs. By integrating multiple imaging modalities, such as MRI, PET, photoacoustic imaging, and fluorescence imaging, multimodal imaging enables comprehensive and high-precision visualization of anatomical structures, physiological functions, and metabolic activities. MRI, with its non-ionizing radiation, high soft tissue contrast, and three-dimensional anatomical imaging capabilities, provides high-resolution background anatomical details and serves as the foundation for real-time navigation of MNRs.8 PET imaging, by detecting the distribution of positron-emitting tracers (eg., Zr-89, Ga-68), supplements metabolic activity and biological distribution information, making it suitable for long-term tracking of deep tissues.50,51 Photoacoustic imaging combines the optical contrast of light with the deep tissue penetration of ultrasound, enabling real-time high-resolution imaging of MNRs (with resolutions as fine as 3.2 μm) in the visible and near-infrared wavelength range. This technique is especially valuable for dynamic monitoring of superficial tissues or vascular networks.48,52 Fluorescence imaging, through the use of fluorescent dyes, quantum dots, or intrinsic fluorophores (such as spirulina), provides highly sensitive optical signals for surface or near-surface detection, making it ideal for in vitro or intraoperative real-time visualization.53,54 This multimodal imaging fusion not only overcomes the limitations of single-modality imaging but also significantly enhances the localization precision, motion tracking capabilities, and therapeutic feedback of MNRs in complex biological environments. It provides comprehensive imaging support for the realization of an integrated diagnosis and treatment platform. Table 3 provides a head-to-head comparison of the imaging modalities used for MNR tracking.
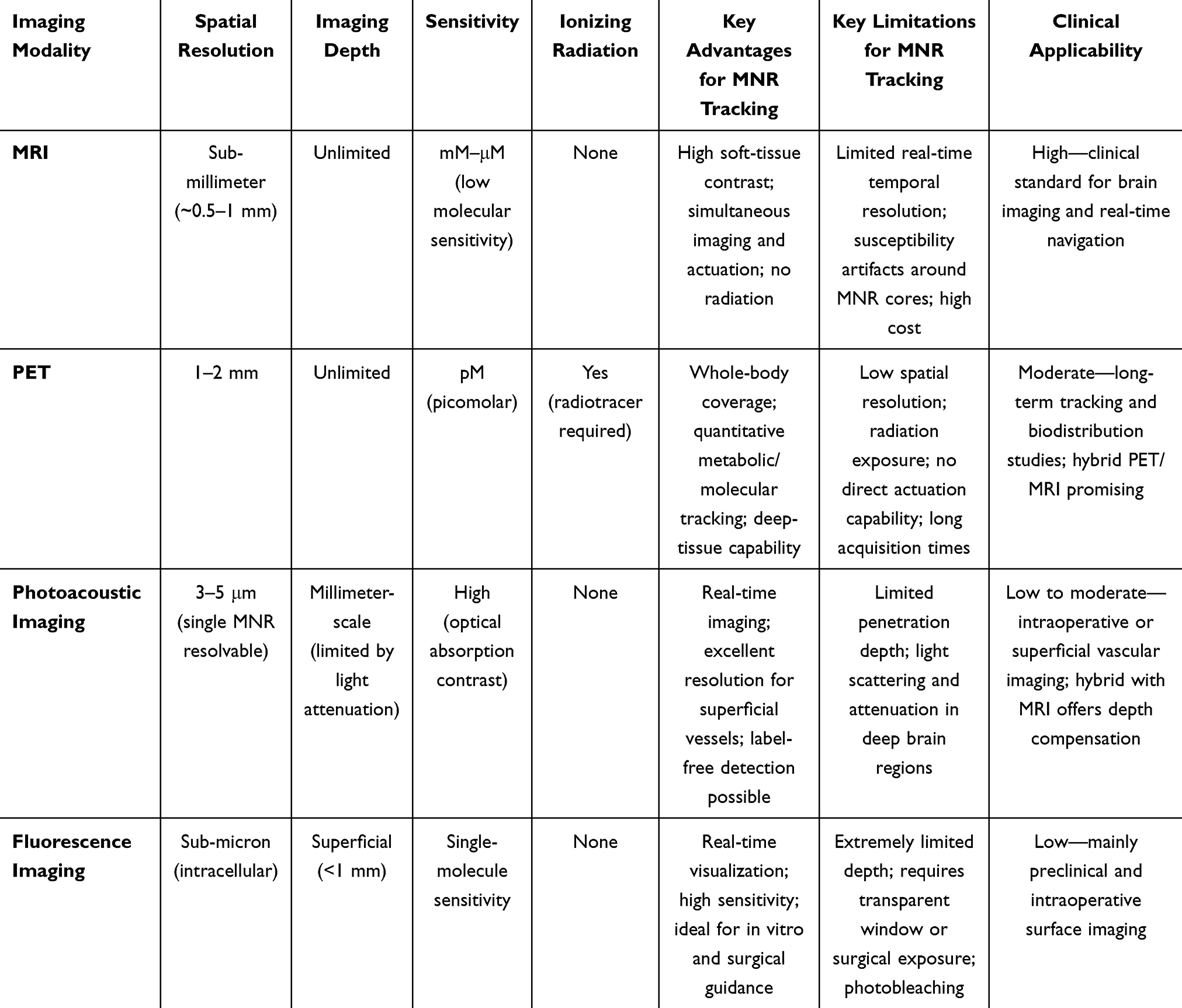 |
Table 3 Comparative Overview of Imaging Modalities for MNR Tracking |
Application of AI and Deep Learning
AI and deep learning technologies play a central role in the intelligent navigation of MNRs,9 with their applications primarily focusing on three key areas:
Firstly, in automatic recognition and motion trajectory tracking, deep learning-based computer vision algorithms can process the vast amount of real-time image data generated by MRI, fluorescence, or photoacoustic imaging, accurately identifying individual MNRs or clusters moving against the complex backdrop of blood flow, and reconstructing their 3D motion trajectories.55 These algorithms typically employ Convolutional Neural Networks (CNNs), which possess strong feature extraction capabilities that effectively overcome interference from biological tissue background noise, motion artifacts, and low signal-to-noise ratios. This ensures reliable data input for subsequent navigation control.
Secondly, in image-based motion planning and prediction, AI systems utilize temporal models such as Recurrent Neural Networks (RNNs) or Long Short-Term Memory Networks (LSTMs) to analyze historical trajectory data and learn the movement patterns of MNRs within the vascular network. The system is capable of predicting their future positions and states. More importantly, the system can integrate individualized vascular anatomical structures, hemodynamic parameters, and real-time magnetic field data to plan the optimal path for MNRs to reach the target lesion. Additionally, it can dynamically respond to environmental changes, such as vascular bifurcations, stenosis, or sudden variations in blood flow velocity, by re-planning the path in real time to avoid collisions or stasis. This significantly enhances the success rate and efficiency of navigation within the complex and dynamically changing neurovascular environment.6,43
Lastly, in the application of digital twin models, researchers have created patient-specific virtual neurovascular network digital twins, providing a safe and controllable simulation environment for MNRs navigation. This virtual model integrates precise anatomical details extracted from clinical MRI, CT angiography, and other imaging modalities, while simulating the non-Newtonian fluid properties of blood and the magnetic field environment. AI algorithms can conduct extensive reinforcement learning training within this high-fidelity simulation environment,10 testing and optimizing various navigation strategies and control parameters to find the most optimal path planning solutions. The trained model is then deployed to the real MRI navigation system to control physical MNRs, bridging the gap between the virtual and real worlds. This significantly reduces the risks associated with direct in vivo operations and optimizes the treatment process. A YOLOv5‑based microrobot detection and tracking system was recently developed, achieving detection accuracy up to 95.81% for millimeter‑scale magnetic microrobots and enabling real‑time 2D and 3D tracking for potential in vivo control.56 In trajectory planning, long short‑term memory (LSTM) networks have been employed to map the relationship between electromagnetic current sequences and trajectory coordinates, enabling automatic navigation along curved and branched paths in simulated vascular tracks without explicit kinematics modeling.57 Furthermore, deep reinforcement learning (proximal policy optimization) has been applied to train navigation policies for magnetic helical microswimmers, achieving navigation success rates of 75% in environments with 30 static obstacles and 60% with 30 dynamic obstacles, significantly outperforming conventional methods.58
Closed-Loop Control Systems
Closed-loop control systems are the core framework for achieving intelligent navigation. A typical system consists of three modules: perception, decision-making, and execution. The perception module obtains real-time position and parameter data of MNRs through MRI imaging; the decision-making module analyzes the current state based on AI algorithms and generates control instructions; the execution module performs control actions via the MRI magnetic field system or other auxiliary devices. As the core imaging and driving platform, the MRI system continuously acquires position signals of the robot and surrounding anatomical information. Its gradient coils not only provide high-resolution imaging but also directly apply magnetic driving forces to control the motion of individual robots or robot clusters.4,59 The AI algorithm dynamically adjusts the motion strategy and generates control instructions based on real-time data from MRI images and preset objectives. The magnetic field drive system then applies the gradient or rotational field with precision according to AI-generated instructions. Clinical MRI platforms have successfully demonstrated the real-time control and tracking of magnetic particles in vivo, such as in the carotid artery of live pigs.59 This “perception-decision-execution” closed-loop architecture, coupled with dynamic optimization through MRI imaging and AI, significantly enhances the navigation accuracy, anti-interference capability, and therapeutic reliability of robots in complex in vivo environments. It provides a solid technical foundation for the clinical translation of MNRs in the precision diagnosis and treatment of neurovascular diseases.
Strategies for Crossing the BBB
Traditional Physical and Chemical Approaches
The BBB consists of microvascular endothelial cells, pericytes, the basement membrane, and astrocytes, with tight junctions and adherens junctions between cells maintaining its integrity. The BBB protects the CNS from toxins and pathogens, but it also prevents the entry of 98% of small molecules and nearly all large molecules, posing a significant challenge for the treatment of neurological diseases.60 Traditional strategies to overcome the BBB mainly involve physical and chemical methods.
In physical approaches, particle size regulation is the most fundamental strategy. Research has shown that controlling the size of MNRs within the range of 10–200 nm can effectively enhance their penetration efficiency, avoiding blockage by the barrier due to large particle size or impaired drug delivery and manipulation capabilities due to small particle size.61 Surface charge also influences penetration ability, with neutral or slightly positively charged particles more easily crossing the BBB than negatively charged particles. Shape also plays a critical role, with rod-shaped or elongated particles demonstrating better penetration capabilities compared to spherical particles, due to their flow characteristics within blood vessels and interactions with endothelial cells.
Chemical methods mainly focus on surface modification to improve BBB penetration. By conjugating specific ligands (such as RGD peptides, transferrin, etc.) or using stealth coatings like PEG, the affinity of MNRs with endothelial cells in the BBB is enhanced, reducing immune clearance and promoting barrier crossing.21,62 Additionally, strategies employed in the cerebrospinal fluid (CSF) system, such as magnetic-driven microbots63 and chemically powered nanomotors,64 enable MNRs to efficiently navigate complex physiological environments and deliver drugs precisely. This significantly improves the bioavailability of drugs in brain tissues, providing new avenues for the treatment of neurodegenerative diseases and brain tumors. For example, Wang et al developed a magnetic-driven biomimetic drug-loaded micro-nanorobot (Figure 5) guided by magnetic resonance imaging and fluorescence imaging, combined with tissue pathological analysis. The optimized magnetic driving characteristics allowed the robot to overcome hemodynamic resistance and penetrate the BBB. The performance of the micro-nanorobot was validated in cell models and tumor-bearing mouse models.65
 |
Figure 5 Wang Z, et al Magnetically driven bionic nanorobots enhance chemotherapeutic efficacy and the tumor immune response via precise targeting. Innovation (Camb), 2025. 6(2): p.65 Reproduced from Ref. [Magnetically driven bionic nanorobots enhance chemotherapeutic efficacy and the tumor immune response via precise targeting], licensed under Creative Commons Attribution 4.0 Unported License (CC BY 4.0: https://creativecommons.org/licenses/by/4.0/). |
Synergy Between Focused Ultrasound (FUS) and MNRs
The combination of FUS and microbubbles (MBs) has emerged as a significant advancement in overcoming the BBB. FUS generates a precise acoustic field in targeted brain regions, causing MBs in circulation to oscillate. This oscillation temporarily disrupts the tight junctions of the BBB, creating a reversible opening that allows MNRs to enter brain tissue. When combined with real-time MRI guidance, this technique can accurately localize the opened regions, minimizing irreversible damage to healthy brain tissue. Studies have shown that the BBB remains in an open state for 24–48 hours after FUS treatment, effectively preventing the intrusion of harmful substances.66 During this process, MNRs not only serve as drug carriers but can also be further modified through surface engineering (eg., cationic components or fluorinated tails) to enhance their interaction with the BBB. This modification improves penetration efficiency and reduces endothelial damage.31 The non-invasive or minimally invasive nature of this approach significantly reduces the risk of infection. Moreover, by enabling precise navigation and prolonging the retention time in the CSF environment, it enhances the bioavailability of drugs within the brain.64 However, it is important to note that excessive surface modification may affect the magnetic responsiveness of the robots. Achieving a functional balance through controlled molecular coupling density requires systematic quantitative research.
Immunomodulatory MNRs
Immunomodulatory MNRs represent an emerging strategy for overcoming the BBB. In addition to acting as a physical barrier, the BBB also serves as an immune barrier, with its permeability being regulated by the immune status of the local environment. By modulating the local immune microenvironment, the permeability of the BBB can be enhanced, facilitating the penetration of MNRs. On one hand, by surface modification with immune-modulating molecules (such as LPS, cytokines, etc)., MNRs can regulate the inflammatory response around the BBB, thereby increasing endothelial permeability and aiding drug delivery across the barrier.67,68 On the other hand, MNRs can be used as carriers for delivering immunotherapeutic agents (such as CAR-T cells, NK cells, or immune checkpoint inhibitors), directly targeting brain lesions and expanding the scope of neuroimmunotherapy.69 For instance, biohybrid MNRs based on macrophages or neutrophils not only utilize their natural immune chemotaxis to cross the BBB but also employ biomimetic camouflage strategies to evade immune recognition, enabling prolonged circulation and precise targeting.22,28 These strategies not only enhance BBB penetration efficiency but also provide new avenues for combined therapies for brain tumors and neurodegenerative diseases. Drawing on the technology of stem cell-assembled magnetic robots (SCASRs) used in the CSF system,70 these immunomodulatory MNRs may also aid in restoring neural connections through differentiation and secretion, showing considerable potential for clinical translation. A substantial barrier to clinical translation is the pronounced variability in BBB penetration efficiency among different models and even among individuals within the same study. FUS parameters, microbubble size distribution, and MNR surface properties all influence the degree of reversible opening, with reported brain uptake ranging from 2% to over 15% ID/g. Moreover, the protein corona formed upon systemic injection can dramatically alter MNR surface chemistry, leading to batch-to-batch and inter-subject differences in BBB traversal.11 Systematic investigation of such variability, together with the development of ex vivo predictive assays, will be crucial to achieve predictable and reproducible brain delivery. Table 4 provides a quantitative comparison of the major BBB-crossing strategies discussed above.
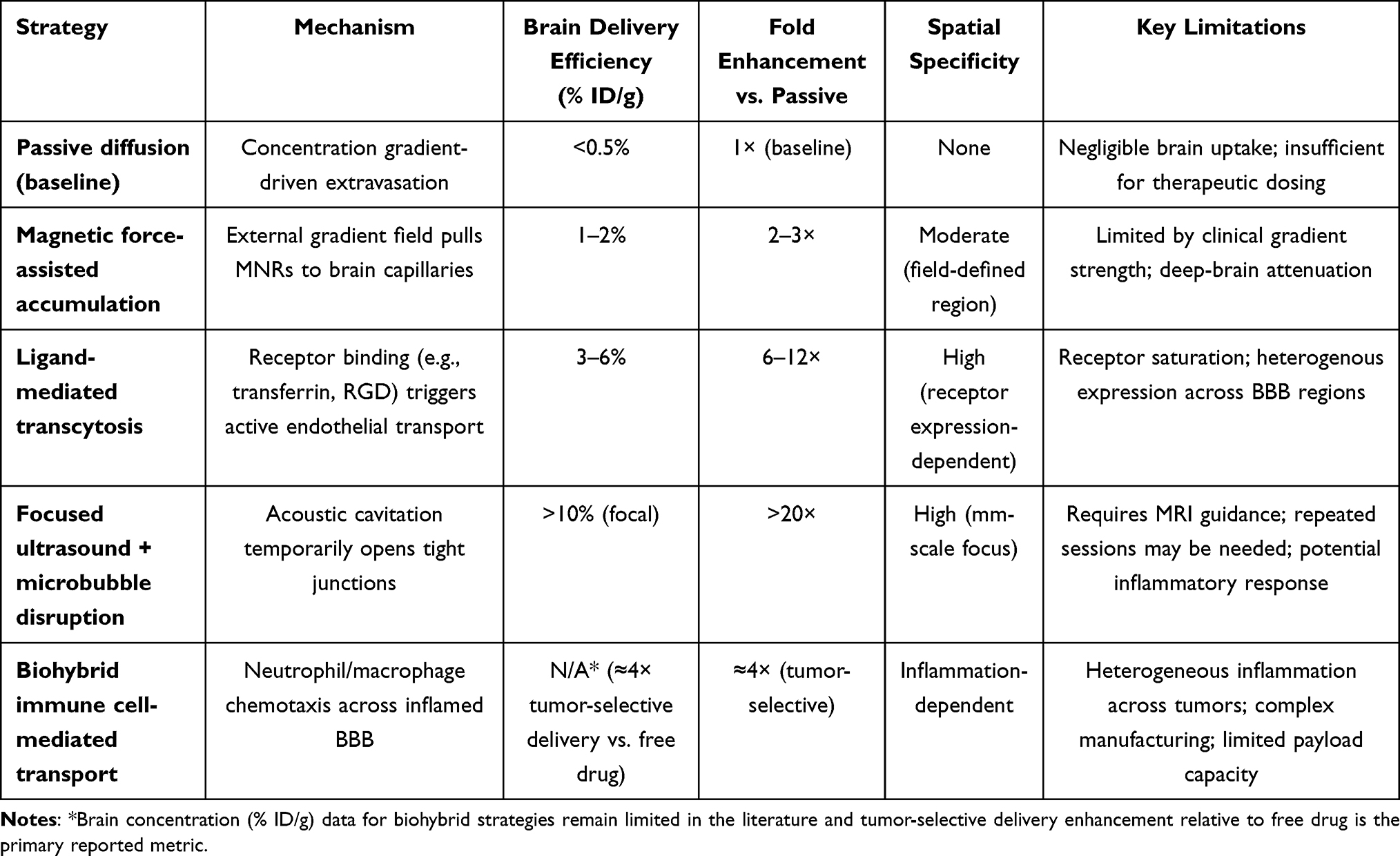 |
Table 4 Quantitative Comparison of Major Strategies for Crossing the BBB with MNRs |
Applications in Neurological Diseases
Brain Tumors
Brain tumors are one of the primary application areas for MNRs. Malignant brain tumors, such as glioblastoma multiforme (GBM), are associated with poor prognosis, primarily due to the challenges posed by the BBB, tumor heterogeneity, recurrence, and metastasis. MNRs provide innovative solutions to these issues. By loading chemotherapy drugs (eg., paclitaxel) or immune modulators, MNRs can cross the BBB under MRI guidance and deliver therapeutic agents directly to the tumor site, significantly improving drug accumulation. For instance, Zhang et al3 demonstrated that drug delivery efficiency exceeded 80% in a mouse glioma model, significantly enhancing therapeutic efficacy while reducing systemic toxicity.
Moreover, MNRs can integrate with SPIONs for magnetic hyperthermia (MHT) and photothermal therapy (PTT). Under alternating magnetic fields, magnetic particles generate heat, locally raising the temperature of the tumor tissue to 41–46°C, inducing apoptosis or necrosis of tumor cells. Combined thermotherapy and chemotherapy generate synergistic effects, where hyperthermia not only directly kills tumor cells but also increases vascular permeability and enhances drug sensitivity, thereby improving the efficacy of chemotherapy.8,71 PTT follows a similar principle but uses light energy instead of magnetic energy.72 Recently, biohybrid microrobots, such as algae-magnetic composites8 and bacteria-driven delivery systems,73 have further expanded tumor-targeting strategies. These innovations show promise, particularly in overcoming tumor hypoxic microenvironments and enhancing immunotherapy. In an orthotopic U87MG glioma model, Ganipineni et al evaluated paclitaxel- and SPIO-co-loaded, RGD-grafted PLGA nanoparticles (~250 nm) under magnetic targeting. The magnetically targeted group achieved significantly prolonged median survival compared with saline controls and groups receiving passive or RGD-active targeting alone. Notably, six doses of PTX at the administered level did not induce detectable hepatic, renal, or cardiac toxicity by blood biochemistry and histology.74
Cerebrovascular Diseases
Stroke is a leading cause of death and disability, with timely restoration of blood flow being a key therapeutic goal. MNRs offer unique advantages in stroke treatment, particularly in targeted thrombolysis and vascular repair. Targeted thrombolysis is a major application of MNRs. Traditional intravenous thrombolytic drugs, such as tPA, have low systemic efficiency and a high risk of bleeding. By loading tPA or other thrombolytic agents onto MNRs, drugs can be precisely delivered to the thrombus site under MRI guidance, enabling localized drug release. This significantly enhances thrombolytic efficiency while minimizing systemic exposure.7 Mechanical thrombectomy is another approach. Magnetic micro-robots can directly disrupt the thrombus physically or serve as “nano-drills” to break apart clots. For instance, Wang et al75 demonstrated the use of micro/nano-robot technology to rapidly separate blood clots from the vessel wall, enabling swift reperfusion without the need for complete clot degradation. More importantly, despite the random shapes of the separated clot fragments, they can effectively travel through the flowing blood vessels via helical swimming, with subsequent retrieval using catheter suction. Novel ultrasound-driven microbullets76 and magnetic nanoscale clusters (nanoscalpels)77 further enhance the mechanical thrombectomy capability, particularly in deep vessels and the microcirculation, where they show unique advantages. Vascular repair is a critical post-stroke therapeutic strategy. MNRs can carry pro-angiogenic factors such as vascular endothelial growth factor (VEGF) and angiopoietins, promoting neovascularization and improving brain tissue perfusion. In addition, MNRs can deliver neuroprotective agents to mitigate ischemia-reperfusion injury, protecting at-risk brain tissue. This multi-modal therapeutic approach offers a comprehensive strategy for enhancing recovery after stroke. In a zebrafish larval model of occlusive cerebral thrombosis, Pontius et al demonstrated that tPA-functionalized magnetic microwheels assembled under a rotating magnetic field achieved rapid and targeted recanalization in vivo. Recanalization occurred only when tPA was coupled to µwheels under magnetic actuation; no meaningful lysis was observed with tPA alone, µwheels alone, or stationary tPA-microparticles. Experiments in CRISPR-generated plasminogen-deficient mutants further confirmed the plasminogen-dependent, dose-responsive mechanism.78
Neurodegenerative Diseases
Neurodegenerative diseases, such as AD and PD, are characterized by abnormal protein aggregation and progressive neuronal loss. MNRs offer innovative therapeutic approaches for these diseases through functional design. Targeting protein aggregates is a significant application of MNRs. In AD, the accumulation of β-amyloid (Aβ) plaques and tau neurofibrillary tangles are key pathological features. MNRs can carry Aβ antibodies, β-secretase inhibitors, and other agents to specifically target and clear these protein aggregates.79 In PD, the aggregation of α-synuclein is central to the pathology, and MNRs can similarly deliver corresponding antibodies or inhibitors to reduce α-synuclein aggregation and its propagation. Neuroprotection is another critical strategy. MNRs can carry neurotrophic factors such as brain-derived neurotrophic factor (BDNF), antioxidants, or anti-inflammatory drugs to protect neurons from damage, promote survival, and support functional recovery. By targeting drug delivery to the affected areas, these protective agents can reach therapeutic concentrations locally while minimizing systemic side effects (Figure 6).80 Recent studies have also explored bio-hybrid systems based on stem cells81 or bacterial carriers,82 which enhance CNS targeting through their natural homing abilities. These systems can promote neuronal regeneration through controlled differentiation or paracrine mechanisms.70 These innovative strategies provide new paradigms for the long-term management of neurodegenerative diseases, particularly in terms of combination therapies and personalized medicine, showing promising potential for future treatments.
 |
Figure 6 Wang Q, et al Untethered miniature robots for minimally invasive thrombus treatment: From bench to clinical trials. Innovation (Camb). 2025 Mar 11;6(6):100874. doi: 10.1016/j.xinn.2025.100874. PMID: 40528888; PMCID: PMC12169274.80 (A) Hydrodynamic convection, Copyright 2014, American Chemical Society; (B) photothermal ablation, Copyright 2018, American Chemical Society; (C) sonodynamic therapy, Copyright 2021, American Chemical Society; (D) mechanical interaction, Copyright 2017, WILEY-VCH; (E) chemical lysis, Copyright 2020, The Authors; and (F) mechanical interaction with chemical lysis and hydrodynamic convection. Reproduced from Ref. [Untethered miniature robots for minimally invasive thrombus treatment: From bench to clinical trials. Innovation (Camb)], licensed under Creative Commons Attribution 4.0 Unported License (CC BY 4.0: https://creativecommons.org/licenses/by/4.0/). |
Despite promising preclinical results, it is important to note that in vivo outcomes have been inconsistent across studies. For example, tumor accumulation of MNRs varied from <1% ID/g to >10% ID/g depending on animal model, tumor type, and magnetic targeting protocol. Several studies reported no significant survival benefit despite efficient tumor delivery, likely due to insufficient drug release or heterogeneous intratumoral distribution. Such discrepancies emphasize the need for standardized reporting of targeting efficiency, therapeutic payloads, and physiological parameters in future investigations.
Challenges and Clinical Translation Barriers
Biocompatibility and Metabolism
The introduction of MNRs into biomedical applications faces numerous complex challenges and limitations. One of the primary concerns is their biocompatibility. If MNRs lack sufficient biocompatibility, they may induce immune responses, which could impair their functionality and pose health risks to patients. Therefore, it is crucial to carefully select, test, and optimize the materials used in nanorobots to ensure their compatibility with the human body.
Magnetic materials (such as iron, cobalt, and nickel) may induce cytotoxicity, oxidative stress, or immune reactions. While studies have utilized biocompatible materials, such as SPIONs, and explored surface modifications (eg., polyethylene glycolylation) to enhance safety,83 their long-term toxicity, degradation products, and metabolic pathways remain unclear.8,84 Long-term residence of iron-based MNRs in brain parenchyma poses particular concerns. Liberated Fe2⁺ ions can participate in Fenton chemistry, generating hydroxyl radicals that induce lipid peroxidation and DNA damage.Long-term residence of slowly degrading or non-degradable magnetic materials may trigger chronic glial activation and low-grade neuroinflammation, yet systematic studies tracking MNR fate in brain tissue over months to years remain largely absent.Biodegradable alternatives such as zinc- or magnesium-based magnetic alloys are under development, but their degradation kinetics in the central nervous system and the neurotoxicity of their corrosion products require thorough characterization before clinical translation. Quantitative in-vitro-to-in-vivo extrapolation models are needed to define safe exposure limits. Some metallic materials may release ions that trigger oxidative stress, and non-degradable magnetic residues could accumulate in brain tissue, potentially leading to inflammation or neurotoxicity.29 Furthermore, repeated administration could provoke immune responses or the generation of antibodies, further limiting their clinical use.
Additionally, the lifespan of MNRs is typically limited to a few seconds to minutes, which poses a significant limitation in practical applications,85 and the aging mechanisms of these materials have not been sufficiently studied.86 Thus, it is essential to assess the long-term biocompatibility of MNRs, thoroughly investigate their degradation products, metabolic pathways, and potential long-term effects on brain tissue and neural function. A comprehensive animal model and clinical trial system must be established to monitor the long-term behavior of MNRs in the human body to ensure they do not induce chronic inflammation, genetic mutations, or other unforeseen health risks. Moreover, the development of fully biodegradable magnetic materials (such as zinc-based, magnesium-based, or hydrogel-based matrices) is necessary to ensure that they can safely metabolize after completing their task.20,87,88
Standardization and Regulatory Frameworks
Standardization is a critical step for translating MNRs from laboratory research to clinical application. At present, clinical investigations of MNRs remain at an early stage, and there is a lack of unified standards for fabrication, characterization, and quality control. Different laboratories employ diverse preparation processes, material compositions, and functionalization strategies, resulting in considerable variability in product performance. For successful commercialization, it is essential to simplify manufacturing steps, ensure quality consistency, and control production costs.89,90 Therefore, establishing an internationally recognized standardization framework is imperative, including standardized testing methods for key parameters such as material purity, size distribution, magnetic properties, and drug-loading capacity.
Given the unique characteristics of MNRs, clinical trial design must also be rigorously standardized. This includes defining patient inclusion criteria, dosing regimens, imaging protocols, and clinical endpoints. Appropriate initial dosing and escalation schemes should be determined based on the magnetic properties, biodistribution, and metabolic behavior of MNRs. In parallel, specialized imaging techniques and biomarkers should be developed to assess targeting accuracy and therapeutic efficacy, accompanied by long-term follow-up studies to evaluate safety and durability.
Ethical and regulatory considerations—such as informed consent, data privacy, and potential misuse—must also be clearly addressed through comprehensive policies and guidelines.91 As MNRs integrate features of both medical devices and pharmaceuticals, their regulatory classification and approval pathways require clarification. Current evidence suggests adherence to established guidelines from regulatory bodies such as the FDA and ISO (eg., ISO 10993 standards for biocompatibility testing),92 and the establishment of an integrated evaluation framework encompassing cytotoxicity, systemic toxicity, and other safety aspects.93 Only through large-scale, multicenter clinical trials under standardized protocols can MNRs achieve credible validation and advance toward real-world clinical translation. A regulatory bottleneck specific to MRI-guided MNRs is their nature as active theranostic systems. According to FDA 21 CFR Part 3, such products may be classified as a drug-device combination because they combine a pharmaceutical payload with an external magnetic control component. The dynamic interaction between the MRI navigational software and the MNR behavior introduces a “digital therapy” dimension that current regulatory frameworks are not fully equipped to evaluate. Pre-market approval would likely require demonstrations of real-time software integrity, fail-safe mechanisms to immobilize the MNRs in case of system failure, and comprehensive characterization of magnetic field-tissue interactions across the intended patient population. Harmonized guidelines from ISO/TC 229 (nanotechnologies) and IEC 60601 (medical electrical equipment) are anticipated to address these gaps.
Interdisciplinary Collaboration Barriers
The advancement of MNRs relies heavily on deep interdisciplinary collaboration, encompassing medicine, materials science, artificial intelligence, and imaging technologies. However, significant differences in language, methodology, and disciplinary culture often impede effective communication and integration. Materials scientists primarily focus on optimizing material properties and fabrication processes; clinicians emphasize biosafety, procedural feasibility, and therapeutic relevance; imaging specialists aim to balance high spatiotemporal resolution with real-time tracking performance;49 and AI researchers concentrate on system integration and the development of intelligent navigation algorithms capable of operating within complex micro- and nanoscale biological environments.10 To overcome these barriers, it is essential to establish effective communication platforms and collaborative frameworks that connect the entire technological chain—from laboratory-scale prototyping to large-scale production.94–96
Intellectual property (IP) management and benefit sharing represent additional challenges. Since MNRs research typically involves contributions from multiple disciplines and institutions, issues surrounding IP ownership and equitable benefit distribution can be complex. Developing transparent, fair, and incentive-compatible IP management and benefit-sharing mechanisms is crucial to fostering sustained collaboration and innovation. Furthermore, talent development remains a fundamental bottleneck. Traditional disciplinary structures are insufficient for cultivating professionals with multidisciplinary expertise. Reforming education systems to introduce interdisciplinary curricula and training programs is essential for preparing a new generation of researchers capable of addressing multifaceted scientific and engineering problems. Establishing interdisciplinary research platforms and teams can also promote knowledge exchange and technological convergence. Looking forward, a tighter and more systematic collaborative innovation ecosystem is needed—one that emphasizes shared platforms, open data, and co-designed experiments. Such an approach will accelerate the translation of MNRs from experimental research to clinical practice, ultimately advancing precision diagnosis and treatment of neurological disorders.
Future Perspectives
Intelligent Theranostic Platforms
Future MRI-guided MNRs are expected to evolve into fully integrated theranostic platforms that combine diagnosis, navigation, therapy, and feedback within a single system. MRI will no longer serve merely as an imaging modality but will function as the central hub for actuation and navigation, enabling a seamless transition from “visualization” to “manipulation” and ultimately to “therapy”.97,98 Through the integration of multimodal imaging technologies—such as photoacoustic-MRI hybrid imaging—together with real-time path planning and responsive drug-release mechanisms, MNRs can achieve precise interventions within the complex neural microenvironment. Advances in materials science will further drive the development of biodegradable and highly biocompatible magnetic materials, such as SPIONs and their composite architectures,8 thereby enhancing their efficacy in BBB penetration, tumor targeting, and neuroprotection while facilitating clinical translation. In parallel, biomimetic and biohybrid strategies—such as neutrophil- or macrophage-membrane camouflaging—can improve immune evasion and enhance BBB traversal, offering new pathways for precision treatment of neurological disorders.
The Convergence of AI, Quantum Imaging, and Immunotherapy
The integration of artificial intelligence and machine learning will play a pivotal role in advancing intelligent navigation, motion planning, and image-based analysis of MNRs.9,10 Deep learning algorithms can optimize magnetic field control strategies, enabling autonomous obstacle avoidance and adaptive trajectory tracking within dynamic physiological environments. Meanwhile, emerging quantum imaging technologies are anticipated to surpass the current limitations of MRI in both spatial and temporal resolution, allowing for ultra-sensitive, single-robot tracking with unprecedented precision. In addition, the synergistic combination of MNRs with immunotherapeutic approaches—such as delivering immune modulators or cytokines to remodel the tumor microenvironment—will establish a novel “imaging–navigation–immune modulation” paradigm.22,69 This tri-modal strategy holds great promise for the treatment of refractory neurological diseases, including gliomas. Furthermore, the implementation of cooperative swarm control and intelligent feedback systems among multiple MNRs will substantially improve therapeutic efficiency, precision, and safety, accelerating the translation of MNR technology from laboratory research to clinical application.
Clinical Feasibility
The translation of MNRs from laboratory research to clinical practice requires a clearly defined and evidence-based roadmap. The process typically involves three key stages: validation of safety and efficacy in large-animal models, initiation of exploratory clinical trials to optimize treatment parameters, and subsequent confirmatory clinical trials to establish clinical benefits and risk–benefit profiles. To date, MNRs research remains largely preclinical, yet remarkable progress has been achieved in fields such as thrombolysis and targeted brain tumor therapy.6,99 Future efforts should focus on expanding clinical studies to characterize the pharmacokinetics, long-term biosafety, and immunogenicity of MNRs in humans. A recent pilot clinical trial for acute ischemic stroke (n = 7) demonstrated that MNR-assisted thrombolysis combined with tPA significantly improved recanalization rates,100 providing a valuable reference point for subsequent investigations. Establishing standardized operating procedures, ethical review frameworks, and comprehensive regulatory pathways will be critical for clinical translation.92,93 Meanwhile, systematic evaluation of biodegradability, protein corona formation, and immune responses remains essential to ensure biosafety and clinical viability.101,102 These steps will collectively determine the feasibility of implementing MNR-based therapies in human patients and pave the way for their future clinical adoption.
Long-Term Vision: Toward Personalized, Precise, and Intelligent Neurotherapeutics
In the long run, MNRs are expected to catalyze a paradigm shift in neurotherapeutics—toward a fully personalized, precise, and intelligent treatment framework. By integrating patient-specific imaging data with AI-driven design and control algorithms, MNRs can be customized to accommodate the unique pathological microenvironments of different brain regions. Digital twin technologies will enable pre-treatment simulation and optimization of therapeutic strategies, while biomimetic camouflage and biohybrid systems will further enhance biocompatibility and targeting efficiency. In parallel, multi-omics analyses may provide insights into treatment responsiveness and long-term prognosis, supporting adaptive therapeutic decision-making. This highly individualized therapeutic model has the potential to significantly improve treatment outcomes and patient quality of life while optimizing healthcare resource allocation. MNRs could eventually become a routine intervention for major neurological disorders such as Alzheimer’s disease, Parkinson’s disease, and stroke—marking a transition from population-based treatment to personalized intervention and redefining the landscape of neurotherapeutics. Furthermore, interdisciplinary collaboration and industrial-scale manufacturing—through technologies such as roll-to-roll fabrication and electrospinning—will accelerate commercialization,95,96 bringing accessible, safe, and efficient precision medical solutions to patients worldwide.
Conclusion
MRI-guided MNRs have demonstrated remarkable interdisciplinary potential and broad clinical prospects in the diagnosis and treatment of neurological disorders. Benefiting from their nanoscale dimensions, magnetically controlled precision, multifunctional integration, and high biocompatibility, MNRs exhibit exceptional capabilities in traversing the blood–brain barrier, enabling targeted drug delivery, performing localized hyperthermia, and executing mechanical interventions.3,7,8 MRI not only provides high-resolution anatomical and functional imaging but also serves as an integrated actuation and navigation platform. Through gradient and rotational magnetic fields, MRI enables real-time closed-loop control and dynamic path planning of MNRs within complex neurovascular environments,4–6 facilitating accurate localization and therapeutic intervention. This transformation marks a fundamental shift of MRI from a traditional “diagnostic tool” to an “intelligent theranostic platform.”
Interdisciplinary collaboration remains the driving force behind progress in this field. Materials science contributes pH-/ROS-responsive materials, liquid-metal systems, and biomimetic membrane coatings;19 engineering provides advanced micro/nanofabrication, 3D printing, and magnetic control technologies;11,35 AI and computational modeling offer intelligent navigation from image recognition to digital-twin–based optimization;43 and immunology together with clinical medicine advances the development of immune-regulatory MNRs and translational applications.68 Such deep integration across disciplines overcomes limitations of single-domain research and fosters an innovative “materials–imaging–computation–clinic” paradigm.
In summary, MRI-guided MNRs represent a disruptive technological platform for neurotherapeutics, enabling the transition from conventional systemic therapies to localized, precision interventions in brain tumors, stroke, and neurodegenerative diseases. Through continued interdisciplinary innovation and technological convergence, MNRs are expected to achieve clinical translation in the near future, offering safer, more efficient, and personalized therapeutic options. Their emergence is poised to redefine precision medicine in neurology, carrying profound scientific significance and transformative clinical value.
Funding
This work was supported by The Summit Advancement Disciplines of Zhejiang Province (Wenzhou Medical University - Pharmaceutics) and Quzhou Technology Project (2024 K078).
Disclosure
The authors report no conflicts of interest in this work.
References
1. Feigin VL, Brainin M, Norrving B, et al. World Stroke Organization: global Stroke Fact Sheet 2025. Int J Stroke. 2025;20(2):132–24. doi:10.1177/17474930241308142
2. Xu S, Wen S, Yang Y, et al. Association Between Body Composition Patterns, Cardiovascular Disease, and Risk of Neurodegenerative Disease in the UK Biobank. Neurology. 2024;103(4):e209659. doi:10.1212/WNL.0000000000209659
3. Zhang L, Wang S, Hou Y. Magnetic Micro/nanorobots in Cancer Theranostics: from Designed Fabrication to Diverse Applications. ACS Nano. 2025;19(8):7444–7481. doi:10.1021/acsnano.4c10382
4. Yu J, Jin D, Chan KF, et al. Active generation and magnetic actuation of microrobotic swarms in bio-fluids. Nat Commun. 2019;10(1):5631. doi:10.1038/s41467-019-13576-6
5. Wang X, Yang T, Li Q. Micro- and nanorobots from magnetic particles: fabrication, control, and applications. Responsive Mater. 2024;2(4):e20240027. doi:10.1002/rpm.20240027
6. Li N, Fei P, Tous C, et al. Human-scale navigation of magnetic microrobots in hepatic arteries. Sci Rob. 2024;9(87):eadh8702. doi:10.1126/scirobotics.adh8702
7. Wang L, Wang J, Hao J, et al. Guiding Drug Through Interrupted Bloodstream for Potentiated Thrombolysis by C-Shaped Magnetic Actuation System In Vivo. Adv Mater. 2021;33(51):2105351. doi:10.1002/adma.202105351
8. Yan X, Zhou Q, Vincent M, et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci Rob. 2017;2(12):eaaq1155. doi:10.1126/scirobotics.aaq1155
9. Yang L, Jiang J, Ji F, et al. Machine learning for micro- and nanorobots. Nat Mach Intell. 2024;6(6):605–618. doi:10.1038/s42256-024-00859-x
10. Behrens MR, Ruder WC. Smart Magnetic Microrobots Learn to Swim with Deep Reinforcement Learning. Adv Intell Sys. 2022;4(10):2200023. doi:10.1002/aisy.202200023
11. Nelson BJ, Kaliakatsos IK, Abbott JJ. Microrobots for Minimally Invasive Medicine. Annu Rev Biomed Eng. 2010;12(1):55–85. doi:10.1146/annurev-bioeng-010510-103409
12. Guix M, Mayorga-Martinez CC, Merkoçi A. Nano/Micromotors in (Bio)chemical Science Applications. Chem Rev. 2014;114(12):6285–6322. doi:10.1021/cr400273r
13. Zhang H, Li Z, He Q. Medical Swimming Cellbots. Adv NanoBiomed Res. 2022;2(10):2200094. doi:10.1002/anbr.202200094
14. Berg HC. Motile Behavior of Bacteria. Phys Today. 2000;53(1):24–29. doi:10.1063/1.882934
15. Smith DJ, Gaffney EA, Blake JR, et al. Human sperm accumulation near surfaces: a simulation study. J Fluid Mech. 2009;621:289–320. doi:10.1017/S0022112008004953
16. Celi N, Cai J, Sun H, et al. Biohybrid Flexible Sperm-like Microrobot for Targeted Chemo-Photothermal Therapy. ACS Appl Mater Interfaces. 2024;16(19):24341–24350. doi:10.1021/acsami.4c02836
17. Li T, Li J, Morozov KI, et al. Highly Efficient Freestyle Magnetic Nanoswimmer. Nano Lett. 2017;17(8):5092–5098. doi:10.1021/acs.nanolett.7b02383
18. Gong D, Celi N, Zhang D, et al. Magnetic Biohybrid Microrobot Multimers Based on Chlorella Cells for Enhanced Targeted Drug Delivery. ACS Appl Mater Interfaces. 2022;14(5):6320–6330. doi:10.1021/acsami.1c16859
19. Wang L, Hervault A, Southern P, et al. In vitro exploration of the synergistic effect of alternating magnetic field mediated thermo–chemotherapy with doxorubicin loaded dual pH- and thermo-responsive magnetic nanocomposite carriers. J Mater Chem B. 2020;8(46):10527–10539. doi:10.1039/D0TB01983F
20. Wang B, Shen J, Huang C, et al. Magnetically driven biohybrid blood hydrogel fibres for personalized intracranial tumour therapy under fluoroscopic tracking. Nat Biomed Eng. 2025. doi:10.1038/s41551-025-01382-z
21. Wu X, Zhang L, Tong Y, et al. Self-Adaptive Magnetic Liquid Metal Microrobots Capable of Crossing Biological Barriers and Wireless Neuromodulation. ACS Nano. 2024;18(43):29558–29571. doi:10.1021/acsnano.4c06603
22. Zhang H, Li Z, Gao C, et al. Dual-responsive biohybrid neutrobots for active target delivery. Sci Rob. 2021;6(52):eaaz9519. doi:10.1126/scirobotics.aaz9519
23. Cong Z, Li Y, Xie L, et al. Engineered Microrobots for Targeted Delivery of Bacterial Outer Membrane Vesicles (OMV) in Thrombus Therapy. Small. 2024:2400847. doi:10.1002/smll.202400847.
24. Chai Z, Ran D, Lu L, et al. Ligand-Modified Cell Membrane Enables the Targeted Delivery of Drug Nanocrystals to Glioma. ACS Nano. 2019;13(5):5591–5601. doi:10.1021/acsnano.9b00661
25. Zhang X, Yao S, Liu C, et al. Tumor tropic delivery of doxorubicin-polymer conjugates using mesenchymal stem cells for glioma therapy. Biomaterials. 2015;39:269–281. doi:10.1016/j.biomaterials.2014.11.003
26. Lu G, Wang X, Li F, et al. Engineered biomimetic nanoparticles achieve targeted delivery and efficient metabolism-based synergistic therapy against glioblastoma. Nat Commun. 2022;13(1):4214. doi:10.1038/s41467-022-31799-y
27. Yuan S, Hu D, Gao D, et al. Recent advances of engineering cell membranes for nanomedicine delivery across the blood–brain barrier. J Nanobiotechnol. 2025;23(1):493. doi:10.1186/s12951-025-03572-y
28. Gao Y, Mao M, Li Y, et al. A self-directed Trojanbot-enzymatic nanobot in neutrobot for active target therapy of glioblastoma. Nat Commun. 2025;16(1):5263. doi:10.1038/s41467-025-60422-z
29. Li N, Zhou M, Wu Z, et al. Artificial Mitochondrial Nanorobots Deliver Energy In Vivo by Oral Administration. Adv Mater. 2025;37(24):2500495. doi:10.1002/adma.202500495
30. Tian L, Ma P, Zhuang W, et al. A transferrin-targeted nanoplatform for MRI-guided visualization and potent suppression of tumors and pulmonary metastatic lesions. Nanoscale Horiz. 2025:
31. Forgham H, Zhu J, Huang X, et al. Multifunctional Fluoropolymer-Engineered Magnetic Nanoparticles to Facilitate Blood-Brain Barrier Penetration and Effective Gene Silencing in Medulloblastoma. Adv Sci. 2024;11(25):2401340. doi:10.1002/advs.202401340
32. Li D, Zhang C, Xiong Q, et al. Elongated Magnetic Nanorobots with Multi-Enzymatic Cascades for Active In Vivo Tumor Targeting and Enhanced Chemodynamic Therapy. ACS Nano. 2025;19(15):15040–15054. doi:10.1021/acsnano.5c01566
33. Liang Q, Zeng J, Jiang Z, et al. Multivoid Magnetic Nanoparticles as High-Performance Magnetic Particle Imaging Tracers for Precise Glioma Detection. Bioconjug Chem. 2026;37(1):118–127. doi:10.1021/acs.bioconjchem.5c00527
34. Wang X, Ho C, Tsatskis Y, et al. Intracellular manipulation and measurement with multipole magnetic tweezers. Sci Rob. 2019;4(28):eaav6180. doi:10.1126/scirobotics.aav6180
35. Abdelaziz M, Habib M. Electromagnetic Actuation for a Micro/Nano Robot in a Three-Dimensional Environment. Micromachines. 2022;13(11):2028. doi:10.3390/mi13112028
36. Lu L, Zhao H, Lu Y, et al. Design and Control of the Magnetically Actuated Micro/Nanorobot Swarm toward Biomedical Applications. Adv Healthc Mater. 2024;13(15):2400414. doi:10.1002/adhm.202400414
37. Mirzae Y, Dubrovski O, Kenneth O, et al. Geometric constraints and optimization in externally driven propulsion. Sci Rob. 2018;3(17):eaas8713. doi:10.1126/scirobotics.aas8713
38. Morozov KI, Leshansky AM. Towards focusing of a swarm of magnetic micro/nanomotors. Phys Chem Chem Phys. 2020;22(28):16407–16420. doi:10.1039/D0CP01514H
39. Jin Z, Nguyen K KT, Go G, et al. Multifunctional Nanorobot System for Active Therapeutic Delivery and Synergistic Chemo-photothermal Therapy. Nano Lett. 2019;19(12):8550–8564. doi:10.1021/acs.nanolett.9b03051
40. Dong X, Sitti M. Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms. Int J Rob Res. 2020;39(5):617–638. doi:10.1177/0278364920903107
41. Yan J, Bae SC, Granick S. Colloidal Superstructures Programmed into Magnetic Janus Particles. Adv Mater. 2015;27(5):874–879. doi:10.1002/adma.201403857
42. Yu J, Wang B, Du X, et al. Ultra-extensible ribbon-like magnetic microswarm. Nat Commun. 2018;9(1):3260. doi:10.1038/s41467-018-05749-6
43. Chen J, Wang Y. Personalized dynamic transport of magnetic nanorobots inside the brain vasculature. Nanotechnology. 2020;31(49):495706. doi:10.1088/1361-6528/abb392
44. Yu J, Yang L, Zhang L. Pattern generation and motion control of a vortex-like paramagnetic nanoparticle swarm. Int J Rob Res. 2018;37(8):912–930. doi:10.1177/0278364918784366
45. Lalande V, Gosselin FP, Vonthron M, et al. In vivo demonstration of magnetic guidewire steerability in a MRI system with additional gradient coils. Med Phys. 2015;42(2):969–976. doi:10.1118/1.4906194
46. Gervasoni S, Pedrini N, Rifai T, et al. A Human-Scale Clinically Ready Electromagnetic Navigation System for Magnetically Responsive Biomaterials and Medical Devices. Adv Mater. 2024;36(31):2310701. doi:10.1002/adma.202310701
47. Pablico-Lansigan MH, Situ SF, Samia ACS. Magnetic particle imaging: advancements and perspectives for real-time in vivo monitoring and image-guided therapy. Nanoscale. 2013;5(10):4040. doi:10.1039/c3nr00544e
48. Yang Y, Yang T, Chen F, et al. Degradable Magnetic Nanoplatform with Hydroxide Ions Triggered Photoacoustic, MR Imaging, and Photothermal Conversion for Precise Cancer Theranostic. Nano Lett. 2022;22(8):3228–3235. doi:10.1021/acs.nanolett.1c04804
49. Aziz A, Pane S, Iacovacci V, et al. Medical Imaging of Microrobots: toward In Vivo Applications. ACS Nano. 2020;14(9):10865–10893. doi:10.1021/acsnano.0c05530
50. Vilela D, Cossío U, Parmar J, et al. Medical Imaging for the Tracking of Micromotors. ACS Nano. 2018;12(2):1220–1227. doi:10.1021/acsnano.7b07220
51. Chen D, Yang D, Dougherty CA, et al. In Vivo Targeting and Positron Emission Tomography Imaging of Tumor with Intrinsically Radioactive Metal–Organic Frameworks Nanomaterials. ACS Nano. 2017;11(4):4315–4327. doi:10.1021/acsnano.7b01530
52. Wrede P, Degtyaruk O, Kalva SK, et al. Real-time 3D optoacoustic tracking of cell-sized magnetic microrobots circulating in the mouse brain vasculature. Sci Adv. 2022;8(19):eabm9132. doi:10.1126/sciadv.abm9132
53. Donaldson L. Autofluorescence in Plants. Molecules. 2020;25(10):2393. doi:10.3390/molecules25102393
54. Wang J, Luo Y, Wu H, et al. Inherently Fluorescent Peanut-Shaped Polymersomes for Active Cargo Transportation. Pharmaceutics. 2023;15(7):1986. doi:10.3390/pharmaceutics15071986
55. Erin O, Gilbert HB, Tabak AF, et al. Elevation and Azimuth Rotational Actuation of an Untethered Millirobot by MRI Gradient Coils. IEEE Trans Robot. 2019;35(6):1323–1337. doi:10.1109/TRO.2019.2934712
56. Li Z, Li Z, Chen R, et al. Learning-based intelligent trajectory planning for auto navigation of magnetic robots. Front Rob AI. 2023;10:1281362. doi:10.3389/frobt.2023.1281362
57. Li H, Yi X, Zhang Z, et al. Magnetic-Controlled Microrobot: real-Time Detection and Tracking through Deep Learning Approaches. Micromachines. 2024;15(6):756. doi:10.3390/mi15060756
58. R Van Durme, G Crevecoeur, L Dupré, et al. Optimized Magnetic Particle Navigation Based on Data-Driven Model for Enhanced Drug Targeting. IEEE Access. 2024. doi:10.1109/ACCESS.2024.3405354
59. Martel S, Mathieu JB, Felfoul O, et al. Automatic navigation of an untethered device in the artery of a living animal using a conventional clinical magnetic resonance imaging system. Appl Phys Lett. 2007;90(11):114105. doi:10.1063/1.2713229
60. Zha S, Liu H, Li H, et al. Functionalized Nanomaterials Capable of Crossing the Blood–Brain Barrier. ACS Nano. 2024;18(3):1820–1845. doi:10.1021/acsnano.3c10674
61. Xu Y, Bian Q, Wang R, et al. Micro/nanorobots for precise drug delivery via targeted transport and triggered release: a review. Int J Pharm. 2022;616:121551. doi:10.1016/j.ijpharm.2022.121551
62. Okmen Altas B, Goktas C, Topcu G, et al. Multi-Stimuli-Responsive Tadpole-like Polymer/Lipid Janus Microrobots for Advanced Smart Material Applications. ACS Appl Mater Interfaces. 2024;16(12):15533–15547. doi:10.1021/acsami.3c18826
63. Ye H, Zang J, Zhu J, et al. Magnetoelectric Microrobots for Spinal Cord Injury Regeneration[A]. Neuroscience. 2024. doi:10.1101/2024.08.06.606378
64. Bao T, Li N, Chen H, et al. Drug-Loaded Zwitterion-Based Nanomotors for the Treatment of Spinal Cord Injury. ACS Appl Mater Interfaces. 2023;15(27):32762–32771. doi:10.1021/acsami.3c05866
65. Wang Z, Wang C, Ji Y, et al. Magnetically driven bionic nanorobots enhance chemotherapeutic efficacy and the tumor immune response via precise targeting. Innovation. 2025;6(2):100777. doi:10.1016/j.xinn.2024.100777
66. Grasso G, Torregrossa F, Noto M, et al. MR-guided focused ultrasound–induced blood-brain barrier opening for brain metastasis: a review. Neurosurgical Focus. 2023;55(2):E11. doi:10.3171/2023.5.FOCUS23227
67. Jindal A, Mainuddin K, A Kumar, et al. Nanotechnology Driven Lipid and Metalloid Based Formulations Targeting Blood–Brain Barrier (3B) for Brain Tumor. Indian J Microbiol. 2025;65(1):92–119. doi:10.1007/s12088-024-01330-6
68. Dogan NO, Suadiye E, Wrede P, et al. Immune Cell-Based Microrobots for Remote Magnetic Actuation, Antitumor Activity, and Medical Imaging. Adv Healthc Mater. 2024:2400711. doi:10.1002/adhm.202400711.
69. Song X, Gul A, Zhao H, et al. Hybrid Membrane Biomimetic Photothermal Nanorobots for Enhanced Chemodynamic-Chemotherapy-Immunotherapy. ACS Appl Mater Interfaces. 2025;17(4):5784–5798. doi:10.1021/acsami.4c16960
70. Shen J, Wang Y, Yao M, et al. Long-span delivery of differentiable hybrid robots for restoration of neural connections. Matter. 2025;8(3):101942. doi:10.1016/j.matt.2024.101942
71. Yahya S, Pushpanathan S, Jan S, et al. Development and characterization of pegylated Fe3O4-CAPE magnetic nanoparticles for targeted therapy and hyperthermia treatment of colorectal cancer. Sci Rep. 2025;15(1):26008. doi:10.1038/s41598-025-11927-6
72. Yang Z, Cheng R, Zhao C, et al. Thermo- and pH-dual responsive polymeric micelles with upper critical solution temperature behavior for photoacoustic imaging-guided synergistic chemo-photothermal therapy against subcutaneous and metastatic breast tumors. Theranostics. 2018;8(15):4097–4115. doi:10.7150/thno.26195
73. De Lanauze D, Felfoul O, Turcot JP, et al. Three-dimensional remote aggregation and steering of magnetotactic bacteria microrobots for drug delivery applications. Int J Rob Res. 2014;33(3):359–374. doi:10.1177/0278364913500543
74. Ganipineni LP, Ucakar B, Joudiou N, et al. Paclitaxel-loaded multifunctional nanoparticles for the targeted treatment of glioblastoma. J Drug Target. 2019;27(5–6):614–623. doi:10.1080/1061186X.2019.1567738
75. Wang Q, Wang B, Chan KF, et al. Rapid Blood Clot Removal via Remote Delamination and Magnetization of Clot Debris. Adv Sci. 2025;12(17):2415305. doi:10.1002/advs.202415305
76. Kagan D, Benchimol MJ, Claussen JC, et al. Acoustic Droplet Vaporization and Propulsion of Perfluorocarbon-Loaded Microbullets for Targeted Tissue Penetration and Deformation. Angew Chem Int Ed. 2012;51(30):7519–7522. doi:10.1002/anie.201201902
77. Wang X, Gong Z, Wang T, et al. Mechanical nanosurgery of chemoresistant glioblastoma using magnetically controlled carbon nanotubes. Sci Adv. 2023;9(13):eade5321. doi:10.1126/sciadv.ade5321
78. Pontius MHH, Ku CJ, Osmond MJ, et al. Magnetically powered microwheel thrombolysis of occlusive thrombi in zebrafish. Proc Natl Acad Sci. 2024;121(10):e2315083121. doi:10.1073/pnas.2315083121
79. Gordón Pidal JM, Moreno-Guzmán M, Montero-Calle A, et al. Micromotor-based electrochemical immunoassays for reliable determination of amyloid-β (1–42) in Alzheimer’s diagnosed clinical samples. Biosens. Bioelectron. 2024;249:115988. doi:10.1016/j.bios.2023.115988
80. Wang Q, Zhao F, Wang B, et al. Untethered miniature robots for minimally invasive thrombus treatment: from bench to clinical trials. Innovation. 2025;6(6):100874. doi:10.1016/j.xinn.2025.100874
81. Chen C, Soto F, Karshalev E, et al. Hybrid Nanovehicles: one Machine, Two Engines. Adv Funct Mater. 2019;29(2):1806290. doi:10.1002/adfm.201806290
82. Chen M, Xia L, Wu C, et al. Microbe-material hybrids for therapeutic applications. Chem Soc Rev. 2024;53(16):8306–8378. doi:10.1039/D3CS00655G
83. Dobrovolskaia MA, McNeil SE. Immunological properties of engineered nanomaterials. Nature Nanotech. 2007;2(8):469–478. doi:10.1038/nnano.2007.223
84. Zhang S, Xu B, Elsayed M, et al. Optoelectronic tweezers: a versatile toolbox for nano-/micro-manipulation. Chem Soc Rev. 2022;51(22):9203–9242. doi:10.1039/D2CS00359G
85. Buck S. Solving reproducibility. Science. 2015;348(6242):1403. doi:10.1126/science.aac8041
86. Stegemeier JP, Schwab F, Colman BP, et al. Speciation Matters: bioavailability of Silver and Silver Sulfide Nanoparticles to Alfalfa (Medicago sativa). Environ Sci Technol. 2015;49(14):8451–8460. doi:10.1021/acs.est.5b01147
87. Esteban-Fernández De Ávila B, Lopez-Ramirez MA, Mundaca-Uribe R, et al. Multicompartment Tubular Micromotors Toward Enhanced Localized Active Delivery. Adv Mater. 2020;32(25):2000091. doi:10.1002/adma.202000091
88. Wang S, Liu K, Zhou Q, et al. Hydrogen-Powered Microswimmers for Precise and Active Hydrogen Therapy Towards Acute Ischemic Stroke. Adv Funct Mater. 2021;31(19):2009475. doi:10.1002/adfm.202009475
89. Pieber B, Gilmore K, Seeberger PH. Integrated Flow Processing — challenges in Continuous Multistep Synthesis. J Flow Chem. 2017;7(3–4):129–136. doi:10.1556/1846.2017.00016
90. Wang L, Hao X, Gao Z, et al. Artificial nanomotors: fabrication, locomotion characterization, motion manipulation, and biomedical applications. Interdisciplinary Mater. 2022;1(2):256–280. doi:10.1002/idm2.12021
91. Foulkes R, Man E, Thind J, et al. The regulation of nanomaterials and nanomedicines for clinical application: current and future perspectives. Biomater Sci. 2020;8(17):4653–4664. doi:10.1039/D0BM00558D
92. Obidin N, Tasnim F, Dagdeviren C. The Future of Neuroimplantable Devices: a Materials Science and Regulatory Perspective. Adv Mater. 2020;32(15):1901482. doi:10.1002/adma.201901482
93. Luo Y, Abidian MR, Ahn JH, et al. Technology Roadmap for Flexible Sensors. ACS Nano. 2023;17(6):5211–5295. doi:10.1021/acsnano.2c12606
94. Park SH, Lee SM, Ko EH, et al. Roll-to-Roll sputtered ITO/Cu/ITO multilayer electrode for flexible, transparent thin film heaters and electrochromic applications. Sci Rep. 2016;6(1):33868. doi:10.1038/srep33868
95. Goswami D, Munera JC, Pal A, et al. Roll-to-Roll Nanoforming of Metals Using Laser-Induced Superplasticity. Nano Lett. 2018;18(6):3616–3622. doi:10.1021/acs.nanolett.8b00714
96. Cho D, Jang JS, Nam SH, et al. Focused Electric-Field Polymer Writing: toward Ultralarge, Multistimuli-Responsive Membranes. ACS Nano. 2020;14(9):12173–12183. doi:10.1021/acsnano.0c05843
97. Chen C, Tang S, Teymourian H, et al. Chemical/Light-Powered Hybrid Micromotors with “On-the-Fly” Optical Brakes. Angew Chem Int Ed. 2018;57(27):8110–8114. doi:10.1002/anie.201803457
98. Li Q, Liu L, Huo H, et al. Nanosized Janus AuNR-Pt Motor for Enhancing NIR-II Photoacoustic Imaging of Deep Tumor and Pt2+ Ion-Based Chemotherapy. ACS Nano. 2022;16(5):7947–7960. doi:10.1021/acsnano.2c00732
99. Ren E, Hu J, Mei Z, et al. Water-Stable Magnetic Lipiodol Micro-Droplets as a Miniaturized Robotic Tool for Drug Delivery. Adv Mater. 2025;37(3):2412187. doi:10.1002/adma.202412187
100. Bladin C, Levi C, Parsons M, et al. Abstract 187: magnetically-Enhanced Diffusion (MEDTM) of intravenous tPA in Acute Ischemic Stroke: a Pilot Safety and Feasibility Trial. Stroke. 2015;46(suppl_1):1. doi:10.1161/str.46.suppl_1.187
101. Nel A, Xia T, Mädler L, et al. Toxic Potential of Materials at the Nanolevel. Science. 2006;311(5761):622–627. doi:10.1126/science.1114397
102. Valsami-Jones E, Lynch I. How safe are nanomaterials? Science. 2015;350(6259):388–389. doi:10.1126/science.aad0768
 © 2026 The Author(s). This work is published and licensed by Dove Medical Press Limited. The
full terms of this license are available at https://www.dovepress.com/terms
and incorporate the Creative Commons Attribution
- Non Commercial (unported, 4.0) License.
By accessing the work you hereby accept the Terms. Non-commercial uses of the work are permitted
without any further permission from Dove Medical Press Limited, provided the work is properly
attributed. For permission for commercial use of this work, please see paragraphs 4.2 and 5 of our Terms.
© 2026 The Author(s). This work is published and licensed by Dove Medical Press Limited. The
full terms of this license are available at https://www.dovepress.com/terms
and incorporate the Creative Commons Attribution
- Non Commercial (unported, 4.0) License.
By accessing the work you hereby accept the Terms. Non-commercial uses of the work are permitted
without any further permission from Dove Medical Press Limited, provided the work is properly
attributed. For permission for commercial use of this work, please see paragraphs 4.2 and 5 of our Terms.
Recommended articles
Awareness and Predictors of the Use of Bioinformatics in Genome Research in Saudi Arabia
Alomair L, Abolfotouh MA
International Journal of General Medicine 2023, 16:3413-3425
Published Date: 11 August 2023
Enhancement Pattern Mapping for Early Detection of Hepatocellular Carcinoma in Patients with Cirrhosis

Nikzad N, Fuentes DT, Roach M, Chowdhury T, Cagley M, Badawy M, Elkhesen A, Hassan M, Elsayes KM, Beretta L, Koay EJ, Jalal PK
Journal of Hepatocellular Carcinoma 2024, 11:595-606
Published Date: 20 March 2024
Advancing Hepatocellular Carcinoma Management Through Peritumoral Radiomics: Enhancing Diagnosis, Treatment, and Prognosis
Huang Y, Qian H
Journal of Hepatocellular Carcinoma 2024, 11:2159-2168
Published Date: 4 November 2024
Artificial Intelligence for Cardiovascular Risk Prediction: An Umbrella Review of Applications and Translational Challenges

Parizad R, Hatwal J, Brar A, Desai R, Batta A, Mohan B
Vascular Health and Risk Management 2026, 22:590502
Published Date: 28 March 2026
Advancements in Nanomedicine for Precision Management of Lymphoma: Mechanisms, Diagnostics, and Therapeutic Strategies
Wang R, Zhang Z, Wang Q, Gu P, Yang Y, Wang B, Teng Y
International Journal of Nanomedicine 2026, 21:580526
Published Date: 22 April 2026